
At present, most of the star sensors developed in China are designed based on stable working conditions, and the dynamic performance of star sensors is generally not high, resulting in significant limitations in their application scenarios. When the star sensor operates under high dynamic conditions, the star points move within the photosensitive area of the image sensor during the integration time, causing the phenomenon of star point pixel dragging, resulting in a decrease in the signal-to-noise ratio of the image and the accuracy of star point centroid positioning. Although shortening the integration time of the star sensor can reduce the length of pixel dragging of star points or avoid the phenomenon of pixel dragging of star points, when the integration time is shortened, the number of stars that the star sensor can observe decreases. When the number of available stars in the star sensor is less than 3, the star sensor will be unable to complete star map recognition and attitude measurement. Therefore, the imaging system of high dynamic star sensors has always been one of the key technologies in the field of high dynamic star sensor research.
(1) Optical lens
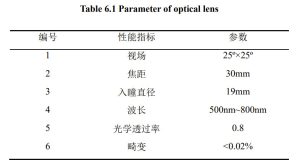
When the star sensor operates under high dynamic conditions, shortening the integration time of the star sensor can reduce the length of pixel dragging or avoid the phenomenon of pixel dragging. However, when the integration time is shortened, the number of stars that the star sensor can observe decreases. When the available number of stars in the star sensor is less than 3, the star sensor will be unable to complete star map recognition and attitude measurement. In addition, when the star sensor operates under high dynamic conditions, its limit detection magnitude decreases, which also leads to a decrease in the number of available stars for the star sensor. In order to ensure that the high dynamic star sensor has a sufficient number of available stars during operation, optical lenses with a large field of view should be selected as much as possible. However, usually, the larger the field of view, the greater the distortion of the optical system, which will seriously affect the positioning accuracy of the star center of mass. Therefore, after comprehensive consideration, this article chooses a field of view of 25 ° × The specific parameters of an optical lens with a focal length of 30mm and a 25 ° angle are shown in Table 6.1.
Table 6.1 Parameter of optical lens
(2) Image sensor
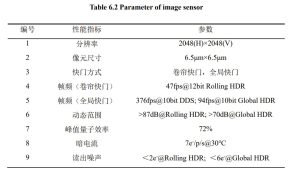
This article selects the highly sensitive SCMOS chip GSENSE2020e independently developed by Changguang Chenxin Optoelectronics as the image sensor of the star sensor. The specific parameters of the GSENSE2020e image sensor are shown in Table 6.2.
Table 6.2 Parameter of image sensor
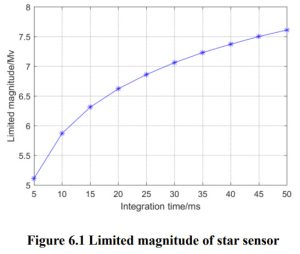
Using the parameters in Tables 6.1 and 6.2, under the conditions of a certain energy ratio of the central pixel of the star target and atmospheric transmittance, the relationship between the maximum detection magnitude and integration time of the star sensor can be obtained according to the formula, as shown in Figure 6.1. From Figure 6.1, it can be seen that when the integration time of the star sensor is 30ms, its theoretical limit detection magnitude is about 7Mv, and the average number of available stars in the field of view is about 188. Therefore, selecting the image sensor in Table 6.2 can ensure that the star sensor has a high detection sensitivity, thereby ensuring that it has a sufficient number of available stars during operation.
Figure 6.1 Limited magnet of star sensor
The GSENSE2020e image sensor has two shutter modes: roller shutter and global shutter. In the shutter shutter mode, the exposure time of each row of pixels is the same, but there is a time difference in the exposure time of different rows of pixels. Therefore, under the shutter shutter mode, there may be imaging distortion when imaging high-speed moving objects. In the global shutter mode, the exposure time of all pixels on the target surface is the same, so there is no imaging distortion when imaging high-speed moving objects. Due to the high angular velocity of the high-dynamic star sensor during operation, in order to avoid distortion of the star image during the imaging process, this article chooses the global shutter mode for the image sensor. Design the electronic part of the high dynamic star sensor imaging system using the GSENSE2020e image sensor, and the schematic diagram is shown in Figure 6.2.
Figure 6.2 Electronic part in imaging system of highly dynamic star sensor
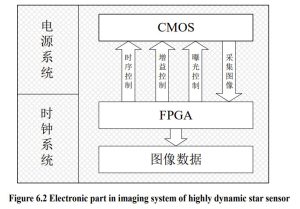
As shown in Figure 6.2, the electronic part of the high dynamic star sensor imaging system mainly consists of a power system, a clock system, a CMOS chip and its peripheral circuits, and an FPGA chip and its peripheral circuits. After providing stable voltage and clock signals in the power system and clock system respectively, FPGA achieves CMOS timing control, gain control, exposure control, and completes image acquisition.
When the star sensor operates under high dynamic conditions, the complexity of the core algorithm of the star sensor increases, and higher requirements are put forward for the processing ability and storage capacity of the star sensor image processing system. Therefore, this article designs the image processing system of the high dynamic star sensor, and its schematic diagram is shown in Figure 6.3.
Figure 6.3 Image processing system of highly dynamic star sensor
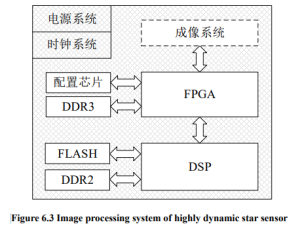
As shown in Figure 6.3, the image processing system of the high dynamic star sensor mainly consists of a power system, a clock system, an FPGA system (mainly including FPGA chips, DDR3 chips, and configuration chips), and a DSP system (mainly including DSP chips, DDR2 chips, and FLASH chips). The selection of chips in the FPGA system and DSP system will be introduced below.
(1) FPGA system
Using Xilinx company’s Spartan-6 series FPGA to complete image reception, simple data processing and logical control. The Spartan-6 series FPGA is a high-performance, low-power FPGA chip launched by Xilinx Company in 2009. It uses a 45nm low-power copper process, which reduces power consumption by 65% compared to the previous generation. The Spartan-6 series FPGA includes 13 chip types, with logic units ranging from 3840 to 147443, and I/O numbers ranging from 132 to 576. Considering both performance and cost, this article selects the XC6SLX150 series FPGA chip, which has a core power supply voltage of 1.2V and an I/O power supply voltage of 1.2V-3.3V. It supports the expansion of DDR3 chips and a data rate of up to 800Mbps.
Using Micron’s MT41J64M16 series DDR3 chip to cache and process FPGA data, improving FPGA processing speed. The power supply voltage of this chip is 1.5V and the capacity is 8M × 16bits × 8banks (1Gb), with a data rate of 1333MT/s.
Select the XCF32P series configuration chip from Xilinx company to complete the FPGA configuration. The core power supply voltage of this chip is 1.8V, the I/O power supply voltage is 1.8V to 3.3V, the capacity is 32Mb, and the data read rate is 33MHz. It can provide four configuration modes: Master Serial, Slave Serial, Master SelectMAP, and Slave SelectMAP.
(2) DSP system
Select TI’s TMS320C6000 series DSP to complete the complex data processing of the system. The TMS320C6000 series DSP is a high-performance processor launched by TI Company in 1979 and has become an important component of the TMS320 series products. It is mainly divided into two categories: fixed-point DSP and floating-point DSP. Usually, floating-point DSP has the characteristics of high accuracy and fast speed, but it has high power consumption and cost. Although fixed-point DSP has slightly lower accuracy and speed, it has been widely used in engineering due to its advantages of low power consumption, low cost, and good stability. After considering both performance and cost, this article selects the TMS320DM642 series DSP chip. In addition to fixed-point instructions, it also includes a series of 8-bit and 16-bit extended instruction systems, which have high performance in video image processing. The chip has a processing speed of 5760MIPS (Million Instructions Per Second) at a main frequency of 720MHz, and EMIFA includes four address spaces from CE0 to CE1, each with a size of 256MB.
In order to ensure that the program and data are not lost when the DSP system is powered down, this article selects Micron’s MT28FW512 series NORFLASH as the extended storage of the DSP, mainly storing the star catalog of the star sensor and the program and data of the DSP. Compared with NANDFLASH, it has a faster data reading speed and can achieve fast reading of the star catalog, program, and data in engineering applications. The chip is powered by 3.3V and has a capacity of 512Mb. The navigation feature library established in this article has a capacity of approximately 58.6MB in the upper computer and a maximum of 468.8Mb in FLASH. However, the storage space occupied by DSP programs and data is very small, so choosing this chip can meet the requirements of this article.
Usually, the startup methods of DSP systems can be divided into three types: (1) the system starts from RAM and runs in RAM. A power outage or reset of the system can cause data loss in RAM. After the system is powered on or reset, the data needs to be reloaded, so this method is usually used in the debugging phase of the program. (2) The system starts from FLASH and runs in FLASH. Usually, the execution speed of programs in FLASH is very slow, so this method not only wastes the performance of DSP, but also cannot meet the real-time requirements of high dynamic star sensors.
(3) The system starts from FLASH and runs in RAM.
This working mode is called Bootload mode, in which the DSP reads programs and data from FLASH after powering on or resetting, and boots them into RAM for operation. This method not only ensures that the program and data are not lost during power failure or reset, but also ensures the real-time performance of the high dynamic star sensor. Considering that DSP requires a large amount of data processing, this article selects DDR to expand the DSP and improve its processing speed. Due to the fact that TMS320DM642 only supports the extension of DDR2, this article selects the DDR2 of the MT47H128M16 series from Micron, with a power supply voltage of 1.8V, a data rate of 800MHz, and a capacity of 16M × 16bits × 8banks (2Gb). After completing the selection of the core chip, this article uses Cadence design software to design the schematic diagram and PCB of the imaging system and image processing system of the high dynamic star sensor. The electronic system of the high dynamic star sensor is obtained through processing and welding, as shown in Figure 6.4.
Figure 6.4 Electronic system of highly dynamic star sensor
The principle prototype of the high dynamic star sensor is obtained by installing and debugging the selected optical lens and the designed electronic system using a mechanical structure, as shown in Figure 6.5.
Figure 6.5 Prototype of highly dynamic star sensor
Send us a message,we will answer your email shortly!
TY-Space Technology (Beijing) Ltd. is professional focusing on advanced attitude optical sensors, especially Star Trackers for space industry.


