What is a navigation star
Celestial bodies remain in relative balance due to gravitation and motion. Visually, all celestial bodies seem to be equidistant, and their relationship to the observer is like a point and the center of a circle on a sphere. This imaginary sphere with the observer as the center and any length as the radius is called the celestial sphere.
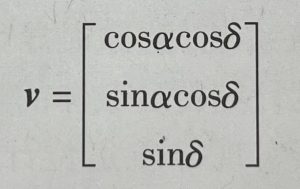
Star trackers use stars as reference points, and after extensive astronomical observations, each star's position in the celestial sphere is relatively fixed, usually represented by the declination and declination of the celestial sphere's spherical coordinates, denoted as(α, δ). According to the relationship between Cartesian coordinates and spherical coordinates, the direction vector of each star in the celestial Cartesian coordinate system can be obtained.
At present, the angular position accuracy of navigation stars in star catalogs is generally in the order of 20 milliarcseconds. Compared with other errors in the development process of star trackers, Its accuracy can be considered adequate. Stars that meet the imaging conditions of the star tracker are selected from the star library to form navigation stars and form a navigation star catalog. The navigation star catalog is solidified once on the ground in the memory of the star tracker.
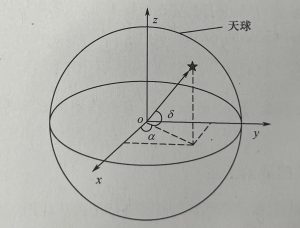
The Description Relationship of Navigation Stars in Spherical and Cartesian Coordinates of the Celestial Sphere
The measurement principle of star trackers
When the attitude matrix of the star tracker is A in the celestial coordinate system, the orientation vector of the navigation star in the celestial coordinate system can be measured by using the pinhole imaging principle of the star tracker, which satisfies a certain functional relationship with the direction vector in the celestial coordinate system. When there are more than two stars to be observed, The attitude matrix of the star tracker is solved by quaternion optimal estimation method. The optimal estimation is obtained in inertial space.
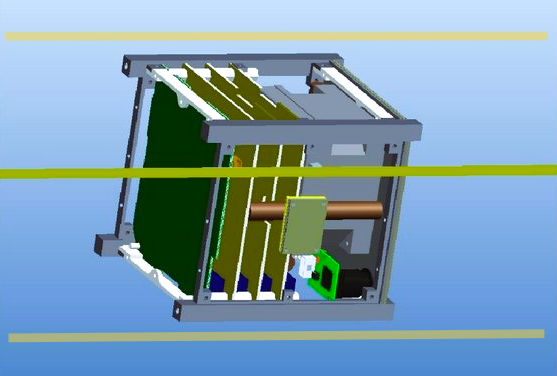
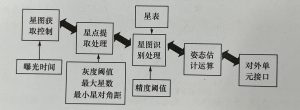
Star tracker workflow
The star tracker first needs to acquire the star map (take pictures) and image the navigation star onto the detector of the star tracker; then perform star point extraction, extract the star point coordinates, and combine the parameters of the star tracker to obtain the star point on the star tracker. The direction vector of the tracker coordinate system is then used to identify the navigation star in the navigation star table corresponding to the current star point on the star tracker coordinate plane according to the star map recognition technology, and then the direction vector in the inertial coordinate system is obtained, and finally using QUEST and other methods are used to obtain the optimal estimate of the attitude matrix corresponding to the star tracker at this time. The star tracker is a component on the spacecraft and needs to be in contact with other parts of the star. Therefore, the star tracker also includes an external interface part.
The working principle of the star tracker is very complicated. The above briefly introduces the navigation star, measurement principle, and basic process. If you want to understand the specific working principle of the star tracker, you need more detailed and in-depth information.
Send us a message,we will answer your email shortly!
TY-Space Technology (Beijing) Ltd. is professional focusing on advanced attitude optical sensors, especially Star Trackers for space industry.