
Satellite attitude determination based on star sensors is the key to controlling satellite attitude and ensuring satellite stability.
The task of the satellite attitude determination system is to use the measurement information of attitude sensors to determine the satellite attitude and provide support for the stable operation of the satellite. In order to accurately estimate the satellite attitude, it is necessary to select appropriate reference coordinate systems and attitude description parameters. This chapter studies the basic theories related to satellite attitude determination, designs satellite attitude determination configuration schemes, and establishes measurement models for star sensors and gyroscopes.
Choosing a suitable reference coordinate system is a prerequisite for determining satellite attitude. Satellite attitude description requires at least two reference coordinate systems, one of which is a spatial reference coordinate system and the other is a fixed coordinate system of the satellite body. To establish the conversion relationship between two coordinate systems, it is necessary to add an auxiliary coordinate system. The commonly used coordinate systems are:
(1) Satellite Body Coordinate System
The origin of the satellite body coordinate system is the satellite centroid, and the x-axis, y-axis, and z-axis directions are the same as the main inertia axis of the satellite body. During the motion of a satellite, the angle of rotation around the x-axis is called the yaw angle, the angle of rotation around the y-axis is called the rolling angle, and the angle of rotation around the z-axis is called the pitch angle.
(2) Satellite orbit coordinate system
The origin of the satellite orbit coordinate system is the satellite centroid, with the z-axis pointing towards the Earth’s center, the x-axis pointing towards the direction of satellite motion, the x-axis and z-axis perpendicular to each other and located in the same orbital plane, and the y-axis perpendicular to that orbital plane. The satellite orbit coordinate system is the reference coordinate system for the stable orientation of the satellite to the ground.
(3) Geocentric inertial coordinate system
The origin of the Earth’s inertial coordinate system is the Earth’s center, the x-axis direction is the direction of the Earth’s center of mass pointing towards the vernal equinox, the z-axis is parallel to the Earth’s rotation axis, and the direction points north. The y-axis is perpendicular to the orbital plane formed by the x-axis and z-axis, and is judged using the right-hand coordinate system criterion.
(4) Attitude sensor coordinate system
There are two coordinate systems for attitude sensors, namely the gyroscopic coordinate system rO (xyz) and the star sensor coordinate system sO (xyz). The origin of the gyroscope coordinate system is the center of mass of the gyroscope. The origin of the star sensor coordinate system is the center of the optical lens, with the z-axis aligned with the optical axis direction and perpendicular to the CCD sensor array plane. The s (x, y) axis is parallel to the sensor array plane, and the three axes meet the right-hand coordinate system criteria.
(1) Euler angle
Euler angles are widely used in satellite attitude description due to their simple concept and clear physical meaning. The core idea of Euler’s angle is to decompose the displacement of a rigid body around a fixed point into a composite of several finite rotations around that fixed point. When using Euler angles to describe the satellite rotation process, the several rotations from the reference coordinate system to the satellite body coordinate system are decomposed into three, and a certain axis of the rotated coordinate system in each rotation is regarded as the rotation axis, and each rotation angle is called the Euler angle. The product of matrices with three rotations can be used to describe the rotation matrix in the form of Euler angles.
The Euler angle principle is simple and its physical meaning is intuitive, making it one of the earliest methods used for satellite attitude determination. However, the calculation of the Euler angle attitude matrix is relatively cumbersome, with a large number of trigonometric function calculations and singularity issues, which is not conducive to practical engineering applications.
Figure 1 Attitude kinematics equation based on Euler angle

(2) Quaternion
Quaternion is an important method for describing satellite attitude, and the concept of quaternion was first proposed by W.R. Hamilton, who established the theory of attitude quaternion. After the 1960s, with the rapid development of aircraft attitude estimation and control systems, quaternions began to be applied in fields such as aerospace. The quaternion q of the satellite attitude is defined as a four-dimensional vector.
Compared with the Euler angle method, the quaternion description method further simplifies the calculation process and effectively avoids the singularity problem caused by Euler angle operation due to trigonometric functions. However, quaternions have redundant parameters and have quaternion normalization constraints.
Figure 2 Quaternion based attitude kinematics equation

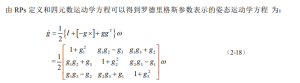
(3) Rodriguez parameter
Rodrigues Parameters (RPs) are a mathematical method for describing the attitude of rigid bodies, proposed by French mathematician Rodrigues. RPs use three parameters to describe the attitude of rigid body rotation, and can be converted and used with quaternions.
The Rodriguez parameters do not have constraints in nonlinear filtering, nor do they have redundant parameters, making them more convenient to operate than quaternion description methods. However, singular phenomena may occur in attitude description.
Figure 3 Attitude kinematic equation based on Rodriguez parameters
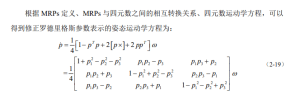
(4) Correction of Rodriguez parameters
The Modified Rodrigues Parameters (MRPS) essentially extend the Rodrigues parameters (RPs) and can also be converted to quaternions.
The advantage of MRPs is that they have only three parameters, a simple expression form, and a corresponding relationship with the attitude. However, singularity problems may arise in the description of the attitude. Different pose parameters have different characteristics and application scenarios. Euler angle has a simple physical meaning and is widely used in attitude theory analysis; Quaternion and Rodriguez parameters are easy to operate and suitable for attitude determination and inertial navigation. In satellite attitude determination, by converting several attitude parameters, singular problems can be avoided while simplifying computational complexity.
Figure 4 Attitude Kinematic Equation Based on Modified Rodrigues Parameters
The performance of various attitude parameters is shown in Table 2-1.
Tab. 2-1 Comparison of attribute description parameters

For the satellite attitude determination system composed of a star sensor and a gyroscope, analyzing its working principle shows that the star sensor can provide high-precision three-axis attitude information of the satellite, but the output frequency is relatively low and cannot output the attitude information in real time. At the same time, there are measurement errors in the measurement values of the star sensor, and it is necessary to correct the measurement information. Gyroscopes can continuously provide satellite three-axis angular velocity information, and the corresponding attitude angle can be obtained through integration. However, gyroscopes have drift errors, integration errors, and other effects, resulting in errors in attitude angle information gradually increasing over time. Therefore, the attitude estimator is formed by combining the measurement information of the star sensor and the gyroscope. The measurement value of the star sensor is used as a reference to correct the gyroscope drift error, thereby estimating the attitude determination error and improving the accuracy of the satellite attitude determination system. The principle diagram of satellite attitude determination based on the combination of star sensors and gyroscopes is shown in Figure 2-1
Fig.2-1 Schematic diagram of combination of star sensors and gyroscopes for attribute determination

(1) Gyro measurement model
Gyro is an important tool for measuring angular velocity and can be used to solve attitude information. The commonly used gyroscopic measurement model is:

The discrete form of the gyroscope measurement model is:

(2) Star sensor measurement model
The star sensor takes the star as a reference reference, and outputs satellite attitude information from the star map information captured by the CCD camera through steps such as star point extraction, star map recognition, and attitude calculation. When the installation direction of the star sensor completely coincides with the star coordinate system, the measurement model of the star light vector in the satellite body coordinate system can be used for measurement:
![]()
Assuming that there are m observation vectors at time k, the measurement mode of the star sensor is:

Starting from the theoretical knowledge in satellite attitude determination, this article introduces the relevant coordinate systems in the process of satellite attitude determination. Research satellite attitude parameters and corresponding attitude matrices, analyze the characteristics of various attitude parameters, derive attitude kinematic equations corresponding to different forms of attitude parameters, design satellite attitude determination configuration schemes, and establish measurement models for star sensors and gyroscopes. By analyzing the basic theory of satellite attitude determination, this provides a theoretical basis for future research on satellite attitude determination based on star sensors.
Send us a message,we will answer your email shortly!
TY-Space Technology (Beijing) Ltd. is professional focusing on advanced attitude optical sensors, especially Star Trackers for space industry.


