
Today, with the rapid development of science and technology, aerospace technology, as one of the rapidly developing high-tech technologies, requires more precise attitude control accuracy and reliability for carriers such as satellites and manned spacecraft, as humans continue to recognize and understand the universe. Usually, the positioning of the carrier is achieved by selecting different reference coordinate systems to develop corresponding attitude sensitive devices. According to the change in the relative position of the carrier to the reference coordinate system measured by the attitude sensor, its attitude change can be inferred. The trajectory and direction of motion of an object are important parameters that affect its attitude. Before a spacecraft operates in space, the measurement of its spatial attitude parameters is quite important.
The main instruments used to determine the attitude of aircraft include the sun, earth, and star sensors. As an attitude measurement device, star sensors have extremely high accuracy and can provide accurate attitude parameters to various aircraft. Compared to attitude measurement devices such as sun and earth sensors, star sensors have advantages such as miniaturization, low power consumption, and strong autonomy. The application range of star sensors, which are more important, is extremely wide. For example, in the navigation field, star sensors are used to locate ships, in the aviation field, star sensors are usually used in the development process of missiles, and in the aerospace field, they are usually used to locate the attitude of satellites.
Due to the maturity of satellite navigation technology and attitude positioning technology, star sensors are increasingly widely used in spacecraft such as satellites. Before putting star sensors into use, their various performance and indicators should be tested and calibrated multiple times. Make it fully applicable to aircraft, and a star simulator is a device for testing star sensors.
Among the well-known attitude sensors, the star sensor has the highest device accuracy. Star sensors are mainly used for measuring aircraft, and the measurement content mainly includes attitude control and attitude measurement. The rapid development of aerospace technology has been promoting the improvement of star sensor technology standards. The accuracy of attitude measurement has steadily improved among the key indicators of star sensors, which has also led to an increase in the accuracy of star simulators. Therefore, designing a high-precision and dynamic star map simulation star simulator is currently the main direction of research and development.
Star simulators can generally be divided into two types based on their service objects: calibration type star simulators (static) and functional type star simulators (dynamic). Their classification criteria are based on their different working methods.
1) A static star simulator is a device that places a star point plate on the focal plane of an optical system, illuminates the light passing through the plate, and images it to infinity through the optical system, completing the simulation of the star map. But it can only simulate a few star maps in a fixed sky area, and calibration is achieved by replacing pre carved star plates. Each star map is represented by a star plate.
2) Dynamic star simulator is a software system that inputs attitude information into the software, and then transmits light through the star map display device, imaging to infinity through an optical system, to achieve star map simulation. By inputting different attitude data, any star map can be simulated and real-time transformation of the star map can be achieved.
The main equipment for ground functional testing of star sensors is a dynamic star simulator, which can simulate the constant star map captured by the star sensor at any time and in any axis of view in the spatial inertial coordinate system. As the main instrument for ground calibration experiments, the dynamic star simulator is used in the subsystem control part of aircraft as a testing target, and forms a closed-loop system with star sensors for testing. It can accurately simulate the imaging of stars and ensure the accurate and effective inter star angular distance between stars. It is also possible to achieve a fully automatic simulation of the attitude changes of the star sensor’s constant-star map captured in the corresponding coordinate system, providing useful data for testing the indicators of the star sensor.
The development of star simulators involves various disciplines and technical fields. Such as astronomy, computer science, image processing, navigation and pose determination technology, pattern recognition technology, etc. As early as the end of the 1940s, foreign countries began to engage in research on star simulators, starting with the study of single star static star simulators. The rapid progress of science and technology is driving the progress of star sensor technology, from the initial star tracker to CCD star sensor. Due to the emergence of CMOS chips, CMOS APS star sensors were successfully developed. The scope of its changes is becoming increasingly broad, and the corresponding technologies are gradually maturing, thus driving the progress of star simulator technology. Star simulators have evolved from single star to multi star, from single star to multi star, from single spectral to multi spectral, and from static to dynamic. The following is the development process of star simulators abroad:
1) Carl Zeiss, a German company, has developed a static star simulator for a collimating optical system composed of four collimating tubes. A star plate with 16 identical holes is placed on the focal plane of the system, and the light source passes through to form a static star map. There is an adjustment device at the light tube, and by changing the adjustment device, the light passes through the star plate and generates a certain offset. The change in star position leads to changes in the star map, which can be used for stability testing of star sensor systems.
2) Eastman Kodak Company in the United States has developed a static star simulator that uses optical fibers to change the star point plate. By placing a fiber on each side of an isosceles triangle and controlling the fiber, light of different colors can be passed through the focal plane of the light tube to simulate a star map with only three star points. By placing filters in the optical path that simulates three star points and changing the combination of filters, it is possible to simulate star points with different spectral characteristics. It enables the simulation range of star magnitude to be between -2 and 8 degrees, thus achieving testing of the performance of the star sensor.
3) Hughes Aircraft in the United States has developed a dynamic star simulator with a high-resolution liquid crystal light valve as the star map display device. By running star map software on a computer, the simulated star map is displayed on a liquid crystal light valve and presented at the entrance pupil of the star sensor through a collimated optical system. It is possible to test the star map recognition and capture of star sensors, but it is not possible to continuously detect the calculation and attitude of star point positions.
4) McDonnell Douglas Aerospace in the United States has developed a star map display device with a resolution of 4096 × 4096, and can provide three sets of mutually independent star maps, each of which can generate approximately 50 simulated star points in a dynamic star simulator. Its field of view is 25 º × 25 º, single star angle accuracy of 100 ″, magnitude simulation range of 2-8, and image refresh speed of 1000Hz.
5) European Space has developed a dynamic star simulator with a silicon based liquid crystal display device. The dynamic star simulator not only improves the comparison of star images, but also truly achieves the lightweight, small appearance, and high accuracy of the dynamic star simulator. The main parameters are as follows: 25 º × A field of view of 25 º, an inter satellite angular distance with an error of less than 18 ″, an alignment accuracy of less than 3.6 ″, and a weight of less than 2kg.
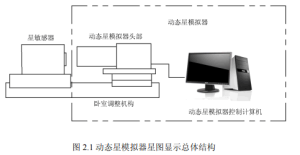
The overall structure of the dynamic star simulation star map display is shown in Figure 2.1. The star map display of the dynamic star simulator mainly consists of: the head of the dynamic star simulator, power control module, adjustment mechanism, and its supporting computer.
1) Dynamic Star Simulator Head
The structure of the head of the dynamic star simulator is shown in Figure 2.2. The structure that forms the head of the dynamic star simulator consists of a collimating optical system, a star map display device, a driving display circuit, a backlight board, etc.
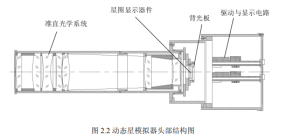
(1) Collimation optical system: The light passing through the star map display device is emitted in a parallel light manner. Finally, it is received by a star sensor to simulate stars at infinity;
(2) Star map display device: used to present simulated star maps. That is to display star points in two-dimensional coordinates, with both horizontal and vertical coordinates and brightness displayed;
(3) Driver display circuit: Control the display screen of the star map display device. Complete the data transmission between the star map display device and the dynamic star simulator computer, ensuring that the star map refresh and display functions on the computer display are normal.
2) Dynamic Star Simulator Star Map Display Computer
The dynamic star simulator star map display computer mainly controls the star map simulation software, controlling the brightness of the stars and the generation of different star maps. The computer stores catalog data. When running the star map simulation software, the corresponding quaternion (attitude information) is input and retrieved from the catalog database. Simulate the star map captured by the star sensor through coordinate transformation, completing the basic function of star simulation.
3) Adjusting the organization
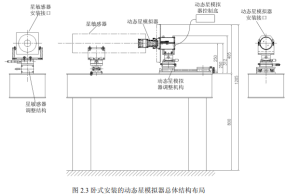
The adjustment mechanism of the dynamic star simulator is shown in Figure 2.3, which is installed on an optical platform. The adjustment mechanism mainly consists of the following parts:
(1) The adjustment mechanism under the head of the dynamic star simulator is 6 degrees of freedom. Its function is twofold: firstly, it is used to install a fixed dynamic star simulator, and its purpose is to make the star simulator coincide with the optical axis of the sensor through fine tuning. The second is used to adjust the relative positions of the star simulator and the star sensor, with the aim of making the exit pupil of the star simulator correspond to the entrance pupil of the star sensor;
(2) The star sensor mounting bracket is used to fix the star sensor, so that it coincides with the optical axis of the star simulator;
(3) The light shield is used to cover the area where the star sensor and the optical axis of the star simulator intersect, reducing the impact of stray light on its testing.
4) Dynamic Star Simulator Control Box
The control box of the dynamic star simulator is mainly used to power the light source and star map display devices, consisting of a DC power supply circuit for the light source, a LCD light valve drive circuit, and other components.
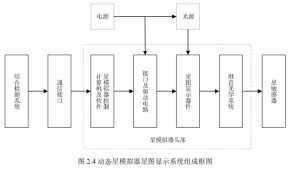
The interrelationships between various parts of the dynamic star simulator star map display system are shown in Figure 2.4. The attitude information provided by the detection unit is input into the control computer of the star simulator, and the star map at this time is filtered out after searching the star catalog. The interface and driver circuit drive the star map display device to present the recognized star map on it. The star map is collimated through an optical system to form parallel light, and the operator uses instruments to observe the generated star map within a limited distance in the laboratory. Achieve simulation effects on real stars.
The dynamic star simulator star map display simulates stars at infinity, so a collimating optical system should be used for design, and its parameters should be basically consistent with those of the star sensor optical system. At the same time, it is necessary to match the optical system parameters of the star sensor, project the simulated star to infinity, and minimize the distortion of the collimated optical system.
The most important aspect of a dynamic star simulator is to simulate each star point in the star map, therefore, its optical system should have good imaging quality. The optical system is affected by factors such as distortion, field curvature, and vertical axis aberration. The impact is as follows:
1) If the distortion of the optical system is too large, it can cause changes in the shape of simulated star points, reducing the accuracy of star point simulation;
2) If the field curvature of the optical system is too large, the star map will not be clearly imaged throughout the entire field of view. When the central image is clear, the edge imaging will be blurry, on the contrary, when the edge imaging is clear, the central image will be blurry;
3) If the vertical axis aberration is too large, the edge of the star image will undergo color change, which will reduce the clarity of off axis point imaging.
In summary, optical systems need to have small distortion and field curvature to meet the requirements of high-quality imaging.
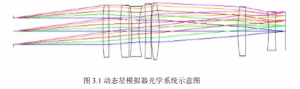
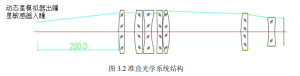
The dynamic star simulator star map displays the optical path of the collimating optical system as shown in Figure 3.1, and the structural parameters are shown in Figure 3.2.
Dynamic star simulators are developing towards miniaturization and high dynamics, and small star map display devices play a crucial role in this device. The liquid crystal light valve can obtain high-quality display star maps in active matrix mode. By controlling the transmittance of the liquid crystal unit, the optical characteristics of the liquid crystal light valve are affected, forming light with different brightness levels. The collimating optical system forms parallel light, and the simulated starlight through the liquid crystal light valve is projected onto the entrance pupil of the star sensor, providing attitude information for the star sensor.
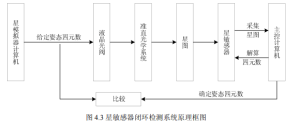
The star map simulation system consists of a star simulator computer, a liquid crystal light valve, and a collimating optical system. The star map simulation software sends out star map data, which is converged to infinity by a liquid crystal light valve and a collimating optical system to form parallel light, achieving high-quality star map simulation. The star sensor testing system is commanded by its main computer to capture the star map generated by the star simulator, perform star map matching recognition, and confirm that the aircraft attitude information is sent back to the main computer. Analyze the instantaneous direction of the star sensor optical axis in the Earth’s inertial space through the main computer, and then clarify the position and attitude information of the carrier after coordinate transformation, as shown in Figure 4.3.
Send us a message,we will answer your email shortly!
TY-Space Technology (Beijing) Ltd. is professional focusing on advanced attitude optical sensors, especially Star Trackers for space industry.


