
The Star sensor is mainly used to provide the satellite’s current attitude information for the attitude control system (ADCS).
The attitude determination and control of multi body satellites is one of the important topics in satellite engineering today. There has been considerable research on large flexible satellites with communication or remote sensing antennas, solar panels, and other accessories both domestically and internationally. However, there have been no reports on domestic research on bipartite satellites such as “bifocal relay mirrors”. This type of satellite research began with the strategic defense system needs of the United States in the early 1990s. In 2000, the United States Navy Graduate School received funding to carry out a series of studies. The model is shown in Figure 1, where satellite B scans for motion, detects ground signals, or captures space information. After processing, satellite A is launched to other ground monitoring stations or space stations, which not only requires satellite A to have three-axis attitude stability and repositioning functions, And it requires satellite B to be able to maneuver flexibly.
Figure 1: Dual Body Satellite and Its Dynamic Model

A concept of “pseudo gyroscope” and its attitude determination method combined with star sensors are proposed for the attitude control system of a dual body satellite. Pseudogyroscopes use measurements from internal sensors of the satellite and satellite parameters to perform real-time soft calculations of dynamic models, track system angular motion, and obtain angular velocity.
The performance of inertial gyroscopes used for attitude determination will deteriorate over time, even fail, limiting the satellite’s long-term operation. Therefore, attitude rate estimation has received widespread attention, such as predictive filtering, star sensor estimation, etc., and “pseudo gyroscope” is a novel and effective method. The “pseudo gyroscope” applies the principle of conservation of moment of momentum, and based on the dynamic model of the carrier, tracks angular momentum through internal sensor measurement information (such as spatial attachment measurement data, momentum wheel speed, and magnetic torque converter data, etc.), thus performing real-time soft calculation of angular rate. Its method is novel and unique, using “software calculation” to replace the physical gyroscope to achieve attitude determination. At present, the accuracy, stability, and reliability of star sensors have been greatly improved, making them ideal small autonomous navigation devices. This article studies the “pseudo gyroscope” and its combination with star sensors to achieve attitude measurement and control of a dual body satellite, as shown in Figure 2. The control components apply momentum wheels and magnetic control unloading, and the attitude is determined using star sensors. Real time soft calculation of the pseudo gyroscope is performed based on internal sensor measurements, and an error state generalized Kalman filter is designed for combined attitude determination.
Figure 2 Functional Module Diagram of the Dual Body Satellite Attention System

Firstly, a dual body satellite model was established and a momentum wheel control law was designed. Based on the measurement information of the star sensor, a generalized Kalman filter was applied to estimate the attitude and angular rate drift errors, and then the pseudo gyroscope and inertial gyroscope were corrected.
For the binary satellite shown in Figure 1, assuming that satellite B is in uniaxial motion relative to main body A, and the centroids of A and B are on the rotation axis, then the centroids of the entire system remain unchanged when B is in motion.
Three orthogonal momentum wheels are used for attitude control of a dual body satellite, while a magnetic torque converter is used for saturation unloading. x. The momentum wheel control laws on the y and z axes are used to represent the external torque of low and medium orbit satellites, where the influence of solar pressure and aerodynamic interference is relatively small and modeling is difficult. Therefore, constant and periodic torques are used in the simulation, respectively. Focus on the gravity gradient and magnetic moment effects that have significant effects.
(1) Pseudo gyroscopic model
The angular rate calculated by the pseudo gyroscope can replace the traditional gyroscope output. In order to further compare with the traditional gyroscope, the following inertial gyroscope model is used, which uses a pseudo gyroscope or a traditional inertial gyroscope, combined with a star sensor for attitude determination. The difference is that the inertial gyroscope corrects the angular rate based on the filtered error estimation, while the pseudo gyroscope requires angular momentum correction.
(2) Design of Generalized Kalman Filter
Design a generalized Kalman filter for error state estimation of attitude error and gyro drift error, and correct the attitude and angular rate outside the filtering cycle.
Apply the combination of pseudo gyroscope/star sensor and inertial gyroscope/star sensor to design a closed-loop control simulation system for comparison. The simulation results show that the attitude determination method proposed in this paper is very effective for the attitude control system of a dual body satellite.
The command motion trajectories of main star A and subsidiary star B are shown in Figure 3.

The attitude determination and control results of the gyroscope/star sensor combination are shown in Figures 4-5, while the results of the pseudo gyroscope/star sensor are shown in Figures 6-7.
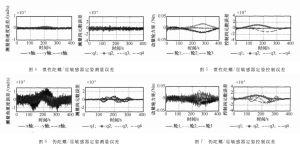
From the simulation results, it can be seen that both attitude determination methods can effectively control the attitude of a dual body satellite; The error Kalman filtering algorithm based on star sensors can effectively improve attitude determination accuracy; Pseudo gyroscopes can be used as auxiliary angular velocity measurement methods or as primary angular velocity measurement in the event of gyro failure. Further comparison of the simulation results of the two attitude systems shows that the influence of environmental interference torque, measurement noise, and other factors on the two systems is not significant. However, the interference caused by the relative motion of the satellite has a significant impact on the pseudo gyroscope. This can be clearly seen from the measured angular velocity of the x-axis in Figure 6. Due to the significant angular velocity and angle changes of star B relative to the x-axis, the measurement results have significant errors, resulting in relatively low control accuracy. Due to the significant impact of system dynamics modeling on pseudo gyroscopes, accurate system models and accurate internal sensor measurements can effectively improve the accuracy of pseudo gyroscopes.
This article establishes a system model for a dual body satellite, using pseudo gyroscopes/star sensors and inertial gyroscopes/star sensors for high-precision attitude determination, momentum wheels for attitude control, and magnetic torque sensors for saturation unloading. A Kalman estimation method for error states is proposed, which uses star sensors to correct satellite attitude errors, pseudo gyro calculation errors, and gyro drift errors. In the case of inertial gyro failure, pseudo gyroscopes can effectively measure the angular rate of satellites.
The attitude estimation and control methods presented in this article, especially the concept of “pseudo gyroscope”, as well as the research on dual body star tracker(star sensor) satellites, are of great significance and have significant application reference value for the design of attitude systems for other satellites.
Send us a message,we will answer your email shortly!
TY-Space Technology (Beijing) Ltd. is professional focusing on advanced attitude optical sensors, especially Star Trackers for space industry.


