
Star sensors are attitude measurement instruments that observe stars. Compared to other attitude measurement devices such as gyroscopes, star sensors have the advantages of light weight, small size, low power consumption, high accuracy, strong anti-interference ability, and independence from other systems for autonomous navigation. Currently, they have become the preferred choice for various space spacecraft attitude measurement systems.
Star sensors mainly have two working modes: initial attitude capture and star tracking. After obtaining the initial attitude through star point centroid positioning, star map recognition, and attitude calculation, the star sensor enters the star tracking mode. In this mode, if the star sensor can continuously and stably output the attitude, it is always in a real-time tracking state. Star sensors usually operate during the stage of smooth flight of the carrier. When the star sensor operates in high dynamic situations such as initial orbit entry, maneuvering, and large angle attitude adjustment of the carrier (especially agile satellites, long-range weapons, and other high dynamic carriers), the following problems will occur: (1) During the integration time, the star point moves within the photosensitive area of the image sensor, ultimately forming a trajectory image on the sensor target surface, Causes a decrease in the signal-to-noise ratio of the image and the accuracy of star centroid positioning; (2) Due to errors in the centroid positioning of star points in star maps, it is easy to cause redundant matching and mismatching problems in the process of star map recognition, resulting in a decrease in the recognition speed and rate of star map recognition; (3) The significant changes in the position of star points in adjacent frame star maps make it more difficult for star sensors to track star point targets, resulting in a decrease in the success rate and efficiency of star tracking. These problems seriously limit the application of star sensors.
At present, many countries are researching high dynamic star sensors to meet the needs of applications under high dynamic conditions. The dynamic performance of star sensors has reached a high level and has been verified in flight and in orbit; The research on star sensors in China started relatively late. Currently, most of the research on high dynamic star sensors is in the stage of theoretical research and simulation experiments. Moreover, the vast majority of star sensors in China are designed based on stable operating conditions, and their dynamic performance is generally not high, resulting in significant limitations in their application. In recent years, with the rapid development of China’s aerospace technology, carriers such as agile satellites, long-range weapons, space maneuvering platforms, and new carriers have gradually relied on high-precision navigation of star sensors. These carriers have strong mobility during operation, requiring star sensors to have higher dynamic performance. Therefore, dynamic performance, as one of the key indicators of star sensors, has become a key research topic in the field of star sensor research.
To address the problems of star sensors operating under high dynamic conditions, several key techniques such as imaging systems, centroid positioning methods, star pattern recognition methods, and star tracking methods can be studied to improve the dynamic performance of star sensors.
(1) Imaging System for High Dynamic Star Sensors
When the star sensor operates under high dynamic conditions, pixel dragging occurs on the target surface of the image sensor during the integration time, resulting in a decrease in the signal-to-noise ratio of the image and the accuracy of star centroid positioning. The length of star pixel dragging is not only related to the angular velocity, focal length, and size of the image sensor of the star sensor, but also influenced by the integration time. Usually, under conditions where other parameters are determined, the shorter the integration time, the shorter the length of star point pixel dragging. Therefore, under high dynamic conditions, shortening the integration time of the star sensor can reduce the length of star point pixel dragging or avoid the phenomenon of pixel dragging. However, when the integration time is shortened, the number of stars that the star sensor can observe decreases. When the number of available stars in the star sensor is less than 3, Star sensors will not be able to complete star map recognition and attitude measurement. From the above analysis, it can be seen that the integration time of the star sensor and the number of available stars are mutually constrained when the detection sensitivity is determined. In order to ensure that the star sensor still has enough available stars after shortening the integration time, it is necessary to improve the imaging system of the star sensor. Although this method can achieve the goal of reducing the dragging length of star pixels, it usually cannot completely eliminate the dragging phenomenon of star pixels due to the limitation of the detection sensitivity of image sensors.
(2) A Method for Centroid Localization of High Dynamic Star Sensors
Under high dynamic conditions, in addition to reducing the length of star pixel dragging by shortening the integration time, the energy distribution of stars can also be more concentrated by restoring the fuzzy star map, thereby achieving the goal of improving the accuracy of star centroid positioning. In addition, when the star sensor operates under high dynamic conditions, the position of star points in adjacent frame star maps changes significantly. If the processing time of the restoration algorithm is long, the centroid position of star points in the star map cannot be obtained in real-time. Therefore, high dynamic star sensors require high real-time performance of the restoration algorithm.
(3) Star Map Recognition Method for High Dynamic Star Sensors
Under high dynamic conditions, although reducing integration time and restoring fuzzy star maps can improve the positioning accuracy of star centroids to a certain extent, it is usually not possible to completely eliminate the positioning error of star centroids. In the process of star map recognition, it is easy to cause redundant matching and mismatching problems, leading to a decrease in the recognition rate of star map recognition. Therefore, when identifying the star map of a high dynamic star sensor, a star map recognition algorithm with strong robustness to the centroid positioning error of the star point should be used to ensure a high recognition rate. In addition, under high dynamic conditions, the attitude of the star sensor changes quickly. If the star map recognition time is long, the star sensor will not be able to capture the attitude in real-time. Therefore, high dynamic star sensors require high real-time performance of star map recognition algorithms.
(4) A Star Tracking Method for High Dynamic Star Sensors
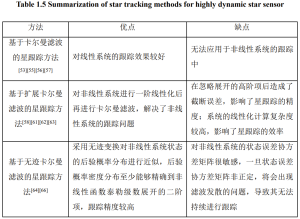
Under high dynamic conditions, the position of star points in adjacent frame star maps varies greatly, making it difficult to accurately locate the position of star points in the next frame star map during star tracking, resulting in a decrease in the success rate and efficiency of star tracking. Due to the fact that the position changes of star points in adjacent frame star maps are mainly caused by the angular velocity of the star sensor, high-precision prediction algorithms can be used to accurately and quickly track the position of star points in the star map after the angular velocity of the star sensor is known. Based on the above analysis results, this article has conducted research on the key technologies of high dynamic star sensors and summarized the current research status.
Table 1.3 Summary of star centric methods for highly dynamic star sensors
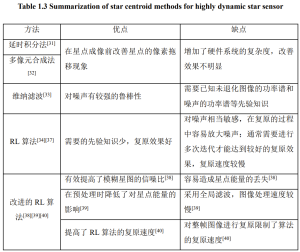
Table 1.4 Summary of star identification methods for highly dynamic star sensors
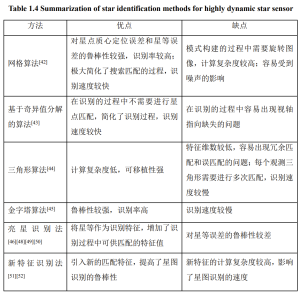
Table 1.5 Summary of star tracking methods for highly dynamic star sensors
Send us a message,we will answer your email shortly!
TY-Space Technology (Beijing) Ltd. is professional focusing on advanced attitude optical sensors, especially Star Trackers for space industry.


