After calibrating the performance parameters of the high dynamic star sensors, it is necessary to test its dynamic performance through experiments. At present, the testing methods for the dynamic performance of star sensors mainly include electronic simulation testing, optical simulation testing, and field observation testing.
(1) Electronic simulation testing
This method sends the simulated star map generated by the software to the star sensor, simulates different working conditions of the star sensor through different simulated star maps, and then tests the algorithm of the star sensor. Due to the fact that the simulated star map is not generated by the imaging system of the star sensor, this method cannot test the performance of the star sensor imaging system.
(2) Optical simulation testing
This method displays the simulated star map generated by the software on a liquid crystal light valve through an imaging tube, and then passes through an optical lens to become a parallel light that enters the star sensor and is imaged on the target surface of the image sensor. The advantage of this method is that it can test the performance of star sensor imaging systems, but due to the limitations of star map simulation accuracy, the testing accuracy is not high.
(3) Outdoor star observation test
This method tests the dynamic performance of the star sensor through field observation experiments. Due to the fact that the observation object of star sensors in practical work is stars on the celestial sphere, any simulation imaging method cannot achieve complete consistency with the imaging of stars. Therefore, this method is currently the most accurate testing method.
Based on the above analysis, this article uses ground observation experiments to test the dynamic performance of high dynamic star sensors, and objectively evaluates their dynamic performance based on the experimental results.
The composition diagram of the ground observation experimental system is shown in Figure 6.7, which mainly consists of a high dynamic star sensor, an electronic control system for the star sensor, a main control computer, a horizontal tracking frame, a control console, and a time system.
Figure 6.7 Experience system of ground testing

Below is a brief introduction to the functions of each component in the experimental system:
(1) Main control computer
Using a portable industrial computer as the main control computer, its main functions are as follows:
(2) Star sensor electronic control system
Responsible for the stable power supply of the star sensor.
(3) Horizon tracking frame
The horizontal tracking frame is mainly composed of vertical axis system, horizontal axis system, fiber slip ring, torque motor, leveling mechanism, limit and locking mechanism, etc. Its main function is to provide dynamic conditions for high dynamic star sensors. The main technical indicators of the horizontal tracking frame are as follows:
(4) Console
The main function of the console is to control the power on and off of the horizontal tracking rack, and send guidance data to the horizontal tracking rack through the main control software.
The ground observation experiment requires selecting an environment with less background light in a clear night sky. The specific experimental steps are:
(1) Before the experiment begins, burn the dynamic conditions of the horizon tracking frame in the form of a file into the FLASH of the star sensor;
(2) Fix the star sensor on the horizontal tracking frame through a mechanical adapter plate, and then power it on;
(3) Send guidance data to the horizon tracking frame through the main control software of the console, and control it to rotate according to the set motion conditions. Due to the obstruction of scenery and stray light on the ground plane, the imaging of the star sensor may be affected. During the rotation of the horizon tracking frame, maintain its elevation angle within the range of 50 ° to 80 °;
(4) When entering the working state, the star sensor first completes the collection of the star map, and at the same time, the time code of the time series received from the serial port is superimposed on the last line of the star map, and the star map is stored in the main control computer;
(5) Process the real-time collected original star maps using the restoration algorithm proposed in this article, and store the processed star maps in the main control computer;
(6) Calculate the centroid coordinates of star points in the processed star map, and use the star map recognition algorithm proposed in this article to recognize the star map;
(7) Use the QUEST algorithm to calculate the initial attitude of the star sensor, and use the attitude tracking algorithm proposed in this paper for star tracking. Store the real-time output attitude of the star sensor in the main control computer. This article verifies the dynamic performance of high dynamic star sensors under two different experimental conditions. Among them, “Experimental Condition One” mainly verifies the proposed fuzzy star image restoration algorithm and star image recognition algorithm, and “Experimental Condition Two” mainly verifies the proposed attitude tracking algorithm.
(1) Experimental condition one
Set the integration time of the star sensor to 30ms, and the azimuth and pitch axes of the horizon tracking frame rotate at a speed of 5 °/s respectively (defined in this article as positive when the angular velocity changes counterclockwise when looking forward from the negative coordinate axis). After the experiment is completed, based on the recorded time code, the original star map and corresponding processed star map at a certain time are obtained from the main control computer (for clear display, the star map is windowed), as shown in Figure 6.8 (a) and Figure 6.8 (b), respectively
Figure 6.8 Original star image and processed star image

As shown in Figure 6.8, there is a pixel drag of about 17 pixels in the original star map, as the field of view of the high dynamic star sensor in this article is 25 ° × 25 °, the resolution of the image sensor is 2048 × 2048, therefore its pixel angular resolution is about 43.95 ″. When the pixel drag length is about 17 pixels, the angular velocity of the star sensor in the current frame can be estimated, with a value of about 4.89 °/s, which is similar to the experimental setting of 5 °/s. It can be considered that the star sensor operates under high dynamic conditions. As shown in Figure 6.8, when there is pixel dragging on the star points in the star map, the energy of the star points is dispersed and interfered by background noise. After real-time restoration using the algorithm in this paper, the energy of the star points in the star map is more concentrated, distributed in 5 × Within 5 pixels, the goal of improving the accuracy of star point centroid positioning has been achieved. However, due to the high level of noise in the star map, it inevitably affects the restoration performance of the restoration algorithm, resulting in the stars being unable to be fully restored. Therefore, the energy distribution of the stars in the restored star map does not meet the Gaussian point spread function distribution. Table 6.5 shows the extraction and recognition results of star points in Figure 6.8 (b). It can be seen from the table that although the energy distribution of star points in the restored star map does not meet the Gaussian point spread function distribution, there may be positioning errors during centroid positioning. However, the star map recognition algorithm proposed in this article can still accurately identify star points, so the algorithm has strong robustness against centroid positioning errors. In addition, due to the deviation between the apparent magnitude of the star and the instrument magnitude, the grayscale values of star points 3 # to 6 # after imaging are not proportional to the magnitude. For example, the magnitude of star point 3 # is lower than that of star point 4 #, but the maximum grayscale value of star point 3 # after imaging is lower than that of star point 4 #. Nevertheless, the star map recognition algorithm proposed in this article can still accurately identify star points 3 # to 6 #, mainly because the algorithm does not use the magnitude of the navigation star as the recognition feature, so it is not affected by magnitude errors.
Table 6.5 The results of star extraction and star identification

(2) Experimental Condition 2
In order to avoid the obstruction of surrounding scenery and stray light from the ground plane from affecting the imaging of the star sensor, the pitch angle of the horizon tracking frame is locked at around 70 °, and its azimuth velocity is set to vary in a sinusoidal pattern with an amplitude of 5 °/s. After the experiment is completed, 901 consecutive frames of attitude data in the yaw direction of the star sensor are captured from the attitude data stored in the main control computer, as shown in Figure 6.9.
Figure 6.9 Attention results of highly dynamic star sensor in the YAW direction

Lock the azimuth angle of the horizon tracking frame at a fixed value, and set its pitch angular velocity to vary in a sinusoidal pattern with an amplitude of 5 °/s
The range is 50 °~80 °. After the experiment is completed, 901 consecutive frames of attitude data in the pitch direction of the star sensor are captured from the attitude data stored in the main control computer, as shown in Figure 6.10.
Figure 6.10 Attention results of highly dynamic star sensor in the pitch direction
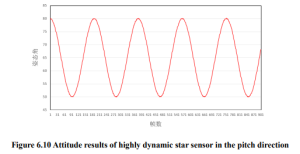
The purpose of using the above experimental conditions in this article is to verify the dynamic performance of a high dynamic star sensor when the angular velocity polarity changes, while avoiding mutual interference between two axis systems. From the experimental results in Figures 6.9 and 6.10, it can be seen that under high dynamic conditions with yaw and pitch directions of 5 °/s, the high dynamic star sensor in this paper can continuously and stably output attitude, and there is no tracking lag or failure when the angular velocity polarity changes, meeting the requirements of the high dynamic star sensor.
Send us a message,we will answer your email shortly!
TY-Space Technology (Beijing) Ltd. is professional focusing on advanced attitude optical sensors, especially Star Trackers for space industry.


