
In the high-precision ground precision calibration task of star sensors, in order to meet its demand for high-precision large field of view multi star simulators, a 20 ° capable system has been developed × A high-precision star simulator that accurately simulates the positions and magnitudes of 65 stars within a 40 ° field of view. The article starts from the principle of star simulator and designs a simulation star bracket based on the spatial coordinate system conversion of the star simulator. By analyzing the errors that affect the direction of the simulation star, key technologies such as “primary and secondary mirror integrated installation”, “all aluminum simulation star system”, and “star hole position compensation” are adopted to design a high-precision simulation star system; Establish spatial position models for each simulated star in the o-x ′ y ′ z ′ coordinate system, derive mathematical models for the pitch yaw angle, single star pointing, and inter star angular distance of each simulated star, and calculate the theoretical errors of single star pointing and star angular distance as the theoretical basis for installation and testing. The experimental results show that the pointing error of all simulated stars is better than 1.914 ″, and the angular distance error of any two simulated stars is better than 4.3 ″; The designed high-precision large field of view multi star simulator meets the accuracy requirements and meets the demand of new star sensors for high-precision large field of view multi star simulators. It can be used as an important equipment for ground performance calibration of high-precision star sensors.
The research on star simulators started early in foreign countries, especially in the United States, where the research and development level of star simulators has always been at the forefront of the world. Eastman Kodak Company guides light with different color temperatures to the focal plane of the collimating light tube and simulates different star sizes by adding different attenuation plates in the optical path, but it can simulate a small number of stars; The star simulator developed by Zeiss can simulate 16 stars, but its inter star angular distance and magnitude cannot be adjusted separately. Since the late 1970s, research has been conducted on star simulators in China. Currently, the existing multi star simulators have a small number of stars, a small field of view (mostly below 20 °), and low calibration accuracy, making it difficult to meet the needs of new star sensors for high-precision and large field of view.
With the continuous development of space technology and military power in China, the requirements for the accuracy of in orbit attitude adjustment of various space spacecraft, satellites, and other types of spacecraft are constantly improving. As a navigation device, star sensors have been widely used. To ensure the navigation accuracy of various star sensors, it is necessary to calibrate them accurately. Star simulators are widely used as high-precision ground calibration systems for star sensors. According to the working mode, it can be divided into standardized and functional detection types. The calibrated star simulator simulates the actual position distribution of multiple stars in the star map, and has high requirements for simulating the star direction and angular distance of each star; The functional detection type is mainly used for calibrating the detection ability and optical signal resolution ability of star sensors. This article mainly focuses on the design and research of standardized star simulators.
(1) Calibration principle
Star sensors observe stars in a specific sky area through features such as star angular distance and stars, and compare and identify them with the navigation star library to obtain star coordinate information. Then, through coordinate transformation, the orientation of the star sensor’s optical axis in space is obtained.
Accurately simulating the distribution and magnitude information of stars in the sky is the key to achieving star sensor calibration.
(2) Working principle
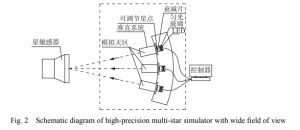
The standardized simulator focuses on simulating the characteristics of single star pointing, inter star angular distance, stars, and so on for each star within a specified sky region. To ensure that each simulated star can be adjusted separately and achieve large field of view and high-precision star simulation, the high-precision large field of view multi star simulator in this paper simulates the distribution of stars in a designated sky area through 65 collimation systems. The working principle is shown in Figure 2. The controller receives command signals and controls the LED light source to emit light of different illuminances by adjusting the current duty cycle combined with a attenuation plate. The light passes through a uniform light system and is directed to a star hole located in the focal plane. The light from the star hole passes through a collimating optical system and is emitted as parallel light. The star sensor receives the parallel light and converges on its image plane to form a complete fixed sky region star simulation map, thus achieving the simulation of stars at infinity.
Fig.2 Schematic diagram of high precision multi-star simulator with wide field of view
The multi star simulator designed in this article consists of simulation star system, simulation star bracket, and base components. The design of the installation position of the simulation star system and the simulation star bracket is the key to achieving the ground calibration capability of the multi star simulator, which directly affects the ground calibration accuracy of the star sensor.
(1) Design of simulation star bracket
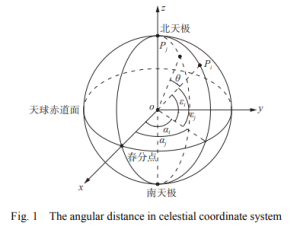
When designing the installation position of the simulation star bracket, in order to accurately simulate the angle relationship between the stars in the designated sky area, it is necessary to convert the given celestial coordinate system into a star sensor coordinate system centered around the star sensor.
Fig.3 The space model of Pi simulation star
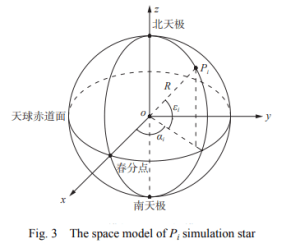
Fig.4 The rotation model of cellular coordinate system
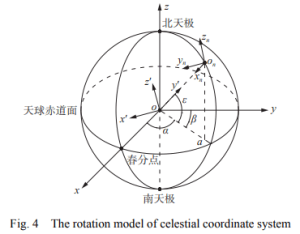
Fig.5 Responding diagram of rotation coordinate system
(2) Design of simulation star system
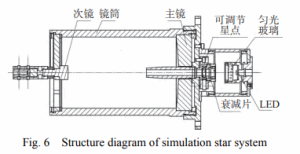
Taking into account factors such as image quality, volume, and alignment, the simulation star is designed as a Cassegrain type collimating optical system with small volume, wide spectral band, and no color difference. It mainly consists of the main body of the primary and secondary mirrors, star hole adjustment components, and LED light sources.
In order to ensure the position accuracy of the multi star simulator, shorten the processing cycle of 65 simulation star systems, reduce the difficulty of assembly and adjustment, and ensure imaging quality, the following four key technologies have been applied:
1) Design the primary and secondary mirrors of the simulated star, as well as the installation lens tube, as an all aluminum structure to avoid strain and thermal stress caused by large differences in linear expansion coefficients, which is conducive to long-term stability of imaging quality and facilitates batch processing;
2) The primary and secondary mirrors adopt an integrated installation structure, which has good consistency and versatility, and is easy and convenient to install and debug;
3) The star hole adjustment component can adjust the position of the star hole in the focal plane to achieve compensation for the angle of the output light of the star simulator, with high adjustment accuracy and effectively ensuring the stability of the star simulator after installation;
4) By adjusting the current duty cycle of the LED light source component and combining it with a attenuation plate to achieve star magnitude adjustment, the control is simple and the adjustment accuracy is high. The design structure is shown in Figure 6.
Fig.6 Structure diagram of simulation star system
Analyzing the errors introduced in the mechanical processing and installation process, as the theoretical basis for the design of star point hole adjustment components, mainly includes the following aspects:
1) Shape error of simulated star bracket and simulated star installation flange;
2) Simulate the position error and installation error of the star bracket;
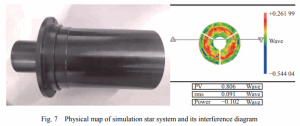
The designed simulated star object and its interference inspection diagram are shown in Figure 7, and the image quality fully meets the usage requirements. After one assembly and adjustment, the mass produced simulation stars are subjected to image quality inspection using an interferometer.
Fig.7 Physical map of simulation star system and its interference diagram
(3) System installation and debugging
The core parameters of a multi star simulator include single star pointing error and inter star angular distance error, and the size of the error determines its calibration accuracy. To ensure the accuracy of the core parameters of the multi star simulator, a Leica theodolite with a measurement accuracy of 0.5 “is used for installation and adjustment.
Only through reasonable installation and adjustment can the accuracy and stability of the star simulator be guaranteed. After the calculation of the pitch and yaw angles of each simulated star is completed, the angle installation and adjustment can be carried out as follows:
1) Adjust the height of the theodolite so that it is at the same height as the simulated star axis of HIP3821;
2) After focusing the theodolite to infinity, adjust the theodolite to make it horizontal, then adjust the direction of the theodolite so that the elevation angle reading of the theodolite is 90.0000 °, and then make the HIP3821 analog star coincide with the cross line of the theodolite by adjusting the star point hole adjustment component. At this time, set the deflection angle of the theodolite to 0.0000 °;
3) According to the theoretical yaw and pitch angle data of any analog star relative to the central analog star HIP3821, adjust the yaw and pitch angle of the theodolite, and then adjust the star point hole adjustment components of the corresponding analog star to make all analog stars coincide with the cross line of the theodolite. The physical image of the high-precision large field of view multi star simulator after installation and adjustment is shown in Figure 9.
Fig.9 Physical diagram of high precision multi-star simulator with wide field of view

The actual imaging results show that the device meets the usage requirements and meets the requirements of high-precision large field of view multi star simulators for new star sensors. It can be used as an important equipment for ground calibration of high-precision star sensors, and is of great significance for determining the attitude of various spacecraft in orbit and space exploration.
Send us a message,we will answer your email shortly!
TY-Space Technology (Beijing) Ltd. is professional focusing on advanced attitude optical sensors, especially Star Trackers for space industry.


