
The technical scheme of a star simulator based on Digital Light Processing (DLP) technology is proposed in order to meet the demands of a star sensor in spacecraft engineering.T he general optical structure is confirmed according to the technical indexes of a star sensor.Then the optical system parameters of the simulator are calculated by the specification of a Digital Micro-mirror Device(DMD).Finallya dynamic display algorithm for the star map is introduced.T he simulating results indicate that field of view of 10.5°×7.5° star magnitude simulated of 2.0~8.0and the single-star field angle of less than40″are obtained and the sampling period is controlled within several milliseconds.T he experimental result can satisfy the system requirements of big field of view wide magnitude range and short sampling period.
Since the development of space vehicles, there is an increasing trend towards using space optical attitude sensors to capture and measure the real-time attitude of the aircraft. Using star light guidance instead of inertial navigation, that is, using star map real-time correction and stabilization of aircraft attitude to replace the star sensor of a single axis or three-axis gyroscope stabilized platform. The aircraft can start the servo system at any time to correct these deviations based on the real-time flight position and attitude deviations provided by the star sensor. Star sensors are currently the most accurate among space optical attitude sensors, and their importance has prompted in-depth research to further improve their accuracy and reliability. With the development of high-precision star sensors, higher requirements have been put forward for the technology and devices used for their detection and calibration, such as miniaturization, dynamism, large field of view, and higher single star accuracy requirements for star simulators.
According to the different display effects, star simulators are divided into two types: static and dynamic. Static simulators are usually composed of a point light source and a series of filters, mainly used to test or calibrate the sensitivity of star sensors to stars of different sizes and magnitudes, and are not used in dynamic experiments of star pattern recognition. The dynamic star simulator is mainly used for functional testing of star sensors and attitude recognition systems, usually forming a closed-loop testing system with the tested star sensor and the main computer to achieve real-time simulation of the sensor observing the starry sky.
With the development of star sensors, the requirements for simulator star images are becoming higher and higher: small single star angle, high inter star angular distance accuracy, optical characteristics with a large dynamic range and sufficient high contrast, as well as high star map refresh frequency and response time, and with light weight and small volume requirements. These indicators put forward high requirements for star simulators. Due to the inherent characteristics of digital light processing (DLP) technology such as high resolution, high contrast, simple structure, and the ability to achieve miniaturization, it is very suitable as a display system to meet the technical requirements of star simulators mentioned above. Therefore, this article proposes a small dynamic star simulator scheme with DLP projection display system as the core device, which better meets the technical requirements of engineering applications for star simulators. The optical system and star map dynamic display software system of the star simulator have been designed and analyzed.
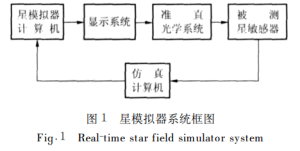
The satellite simulator computer receives the current attitude and orbit information of the satellite provided by the simulation host computer, and determines the direction of the optical axis. Then load the catalog file, determine the navigation stars in the field of view centered on the optical axis based on the field of view range of the star sensor, and read out the declination, declination, and magnitude data of each navigation star. Finally, coordinate transformations are performed on the right ascension and right ascension of each star, which are converted into the plane coordinates of the star sensor. Through the star simulator display system, they enter the collimation optical system and are received by the measured star sensor. The system diagram is shown in Figure 1.
In traditional display methods, whether it is a cathode ray tube (CRT), liquid crystal display (LCD), electroluminescence (EL), plasma display panel (PDP), etc., the final display output process is simulated. Due to the need for D/A conversion before video display, it adds noise to the system and reduces the signal-to-noise ratio. This article adopts DLP technology, achieving full digital processing and producing high brightness and contrast display images. The core of DLP technology is the Digital Micromirror Device (DMD) produced by Texas Instruments. DLP technology is composed of DMD as the core, including DMD, electronic circuits surrounding DMD, and optical engines.
DMD is an optical switch array composed of tens of thousands of small mirrors that can be moved and flipped. It is both a micro motor system (MEMS) and a reflective spatial light modulator (SLM). The biggest feature of DLP technology is its fully digital feature, which is the input of digital electronic words – the output of digital optical words. The so-called “digital electric input digital optical output” refers to the DLP projection display system receiving digital video signal input, storing the data representing image information into the CMOS unit below each DMD micro mirror through the DMD controller, and then controlling the flipping state of the DMD micro mirror based on this data, enabling each micro mirror to switch between the “on/off” two states at high speed, achieving modulation of the incident illumination light and forming digital light output, And generate the final video image output through its optical engine.
(1) Design of large field of view optical aperture and exit pupil position
The determination of the diameter of the parallel light emitted by the light tube should be considered in conjunction with the optical system parameters of the sensor.
Firstly, the exit pupil of the optical tube should coincide with the entrance pupil of the sensor to ensure that the total optical flux of the light emitted by the star points in the full simulated field of view to the entrance pupil of the sensor is the same. Therefore, the optical tube is an optical system with the exit pupil outside.
Secondly, the size of the exit pupil of the light tube should be the same as the size of the entrance pupil of the sensor. The excessive pupil size of the light tube results in a waste of light flux due to the limitation of the sensor’s entry into the pupil, and increases the structure and weight of the light tube. If the exit pupil is too small, it does not comply with the principle of matching with the star sensor pupil.
The distance between the exit pupil and the pupil of the light tube needs to be determined by referring to the position of the sensor’s entrance pupil and the degree to which the simulator can approach the sensor. The actual design value is considered as: exit pupil diameter Φ 52mm, with an exit pupil distance greater than 120mm.
(2) Determination of Display Star Map Resolution and Selection of DMD Chip
Display star map field of view: 10.5 ° × 7.5 °, with a single star angle of 40 ″, then:
At least the number of display pixels in the 10.5 ° direction should be: (10.5 ° × 3600 ″/40 ″=945;
At least the number of display pixels in the 7.5 ° direction should be: (7.5 ° × 3600 ″/40 ″=675;
The currently selected DMD chip has a pixel count of 1024 × 768, meeting the minimum pixel count requirements mentioned above.
(3) Requirements for contrast of DLP projection system
The selected DLP projection system has a contrast ratio of 2001:1.
Simulate 2-8 magnitude stars with a contrast ratio of 2.516:1=250:1. It can be seen that the selected device meets the requirements.
(4) Determination of the focal length of the main optical system
According to the provided information, it is known that the size of a single pixel on a DMD chip is 16 μ M × sixteen μ m. The total effective size is 17.78mm × 13.34mm, and the field angle of the star sensor optical system should not be less than 10.5 ° × 7.5 °, considering the design parameters of the optical system, the field of view for the optical system design of the star simulator is marked as: 11 ° × 8 °.
The selection of focal length should also meet the requirements of diagonal field of view, and the focal length of the system can be set to 96.2mm.
(5) Determination of the minimum single star angle
When using a single pixel as a star point, the single star angle is 34.3 ″, indicating that this design meets the technical requirements of a star simulator with a single star angle better than 40 ″.
(6) Relative aperture of the main optical system
Based on the requirements of structure, single star angle, and effective field of view, the diameter of the incident pupil and the focal length value of the system have been determined above. Therefore, the relative aperture D/f ‘that the optical system should have is: 1/1.85.
(7) Modeling and Optimization of Optical Systems
In order to ensure the accurate position of all stars in the star field and the constant energy field, the optical system is required to have small distortion, flat image field, apochromatic imaging quality, and a large field of view, which makes the design very difficult. In this article, the parallelism error of parallel light passing through an optical system at any star point in the full field of view is ≤ 10 ″, with a wavelength range of 0.48-0.71 μ m. Center wavelength λ 0=0.58 μ m. And the aberration is corrected by four spectral lines, namely the F line, D line, e line, and R line, to ensure compliance with Δ ω≤ 10 ″ requirement.
(1) Transformation of coordinate systems
In each catalog, the orientation of stars is expressed in the celestial inertial coordinate system, and star sensors require the star position achieved in the star simulator to be represented on the receiving CCD plane. This involves the transformation between different coordinate systems.
For most practical Earth observation satellites, due to factors such as resolution, few have orbits higher than the Earth’s synchronous orbit. Therefore, it is advisable to take the satellite’s lower point height as Hsatellite=30000km. The star closest to Earth (neighboring star) is 3.9 meters away from the Sun, except for the Sun × 1013km, with an average distance of 1.5 between the Earth and the Sun × 108km.
Take the nearest DStar Earth and DSatellite Earth, with an inter star angular deviation of 0.0001889 ″; The design of general star simulators requires a star diagonal distance error of within 50 ″. Therefore, there is no need to consider the error caused by the translation of the coordinate center point from the Earth center to the satellite CCD plane, only the rotation transformation needs to be considered.
(2) Partition of the starry sky
After reading the FK5 catalog data, the stars in the field of view can be directly found based on the declination and declination of the optical axis set by the operator. If a simple direct search method is used, every time the optical axis changes, it is necessary to search all the stars in the catalog to find the stars in the field of view. But this method will waste a lot of time when performing dynamic display. Therefore, this article adopts the method of partitioning the starry sky to search for stars in the field of view within a limited number of partitions, in order to achieve the goal of rapid retrieval.
Known star map field of view is 10.5 ° × 7.5 ° and considering the rotation angle, the diagonal of the field of view is taken as 13 °. Due to the deviation of attitude error, this article takes 15 ° × 15 ° is the consideration range. After analysis, the star table was divided into 7.5 degrees × A sub region of 7.5 ° is suitable.
The range of right ascension change is 0-360 °, divided into 48 zones, numbered 0-48; The declination changes from -90 ° to+90 ° and is divided into 24 zones, numbered 0-24. So, there’s a total of 48 × 24=1152 sub regions. For convenience, X represents the area code in the declination direction and Y represents the area code in the declination direction in the text. The steps for searching the navigation star partition are as follows:
Firstly, calculate the sub area code where the optical axis falls into. List the 3 surrounding the sub area × 3 sub regions. The navigation star in the field of view must fall within these 9 sub regions. In these 9 sub regions, searching for navigation stars within the field of view avoids searching within the 1152 sub regions of the entire celestial sphere. The theoretical computational complexity is 9/1152=1/128 without adopting partitioning algorithms, ensuring that the star simulator has a shorter star map sampling period.
Set the right ascension of all navigation stars in 9 sub regions as α S. Declination δ S. The right ascension of the optical axis is α 0. The declination is δ 0 The formula for extracting navigation stars is: | α S – α 0 | ≤ 12 °, | δ S – δ 0 | ≤ 12 °.
(3) Static Star Map Simulation
In the coordinate system setting, with the optical axis as the center point, the display window is the field of view, 10.5 ° × 7.5 °. Subsequently, based on the coordinates of the navigation star in the field of view and the satellite rotation angle, the coordinate values of the navigation star in the star sensor coordinate system are calculated and projected onto the screen. In addition to coordinates, it is also necessary to simulate the magnitude of a star, which requires converting the magnitude to grayscale. The simplest method is to use linear transformation, where the formula is UI=Umax 10 (mI mmin), where Umax is the preset maximum grayscale value and mmin is the minimum magnitude that the star simulator can display. The UI and mI are the display grayscale values and magnitude of the current star, respectively.
(4) Dynamic Star Map Simulation
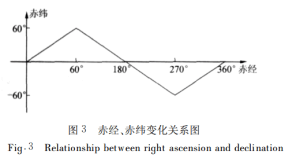
When a satellite is operating in space, the star map received by the star sensor is constantly changing, which is why dynamic display design of the star simulator is necessary. Assuming a satellite flight cycle of 1 cycle/h, i.e. 0.1 °/s, with an inclination angle θ At 60 °, the right ascension at the intersection with the equator is 0 °. Within 1 hour, the right ascension is 0 ° → 360 ° → 0 ° →, and the right ascension is 0 ° → 60 ° → 0 ° → -60 ° → 0 ° →. The change relationship is shown in Figure 3.
(5) Simulated star map
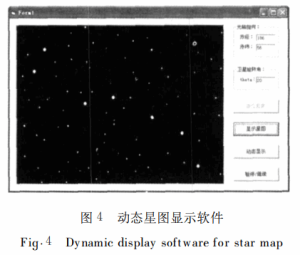
Based on the provided catalog data and the above algorithm, a dynamic display program for a small star simulator can be developed using programming software. This article adopts Visual Basic6.0 development program, and the entire software runs well in the Chinese version of Windows XP environment, meeting the development requirements of star sensors. Figure 4 shows the dynamic star map simulation display software. The position of the Big Dipper (Ursa Major) can be clearly seen in the simulation software, thus proving that the software’s design philosophy is correct. The seven larger stars in the picture are the seven stars in the constellation Ursa Major.
Starting from the engineering needs of miniaturization and dynamic display, this article selects the DLP display system as the core of the star simulator system based on the advantages of DLP display technology. Based on the model specifications of the selected DMD chip, the aperture, focal length, and other parameters of the star simulator optical system were calculated and analyzed. A star simulator collimation optical system that meets the requirements was designed, and the structure and aberration curve of the star simulator optical system were provided. A dynamic star map simulation algorithm was proposed on a computer, and according to the requirements of the star simulator development task, computer programming of the dynamic star map algorithm was implemented on the Visual Basic6.0 platform. The calculation and software simulation results show that the dynamic star simulator based on DLP can simulate a field of view of 10.5 ° × 7.5 °; A starry sky with magnitudes ranging from 2.0 to 8.0; The single star angle of the simulator is better than 40 ″; The sampling period can be controlled in milliseconds. The star simulator described in this article has advantages such as a large field of view, wide magnitude range, and short sampling period.
Send us a message,we will answer your email shortly!
TY-Space Technology (Beijing) Ltd. is professional focusing on advanced attitude optical sensors, especially Star Trackers for space industry.


