
The operating principle and the system requirements of a dynamic display system for star map is described in the paper.T he application method of T FT-LCD in the dynamic display system for star map is discussed and TFT-LCD circuit scheme is proposed.Some analysis and research for the design of the main software used in dynamic star map are carried out.
Astar sensors is a detection device that simulates the sky on the ground to test the star map recognition algorithm of star sensors. The star map dynamic display system is one of the core components in the star simulator to achieve rapid query, retrieval, coordinate transformation, data transmission, and star map display refresh control of the star database. It is also one of the key components in achieving miniaturization and dynamism of the star simulator. With the development of star sensors, the requirements for star images are becoming higher and higher: small single star angle, high inter star angular distance accuracy, optical characteristics with a large dynamic range and sufficient high contrast, as well as high star map refresh frequency and response time, and light weight and small volume requirements. These indicators put forward high requirements for star map display devices used in star map dynamic display systems. At present, the main star map display devices used domestically and internationally are LCD screens for CRTs and PC laptops. Their main characteristics are large external dimensions, high requirements for the optical system of the star simulator, and unsatisfactory production costs and cycles. This article uses TFT-LCD as a star map display device, which effectively overcomes these shortcomings. The following introduces the working principle and system requirements of the star map dynamic display system, and discusses the application method and circuit implementation scheme of T FT-LCD in the star map dynamic display system. It also analyzes and studies the design of the main software for star map dynamic display.
The basic working mode of a star map dynamic display system is: the computer accurately positions the star target within the specified field of view using the star position in the star library, and sends the star image to the display screen of the star map display device through the driving circuit of the star map display device through the multi frequency card of the computer in the form of an image. In system design, the performance of star map display devices directly affects the volume and dynamic characteristics of the system. We analyze the optical display characteristics, capacity, resolution, panchromism, display quality, response speed, driving voltage, power consumption, weight, overall dimensions, and other aspects of various display devices such as CRT, liquid crystal (simple matrix and active matrix), EL (electroluminescence), PDP (plasma display panel), and fluorescent display tubes Compare various performance parameters such as cost. Choosing TFT-LCD active matrix liquid crystal display devices as star pattern generation devices can meet the miniaturization and dynamic characteristics of star simulators.
The main computer of the star simulator activates the SAO star catalog in real time locally based on the spatial orientation parameters of the star sensor provided by the large system computer (which are related to the spacecraft attitude and orbit parameters), and calculates the angular positions of each star in the field of view corresponding to the simulated probe. The star map display circuit “translates” it into the plane Cartesian coordinate positions on the T FT-LCD LCD display board inside the probe, and the interface circuit, Reproduce these star points on T FT-LCD through transmission cables, and adjust the electrical parameters of T FT-LCD optical properties to reproduce the different brightness amplitudes of these star points (to represent different star magnitudes), ultimately forming a complete star image.
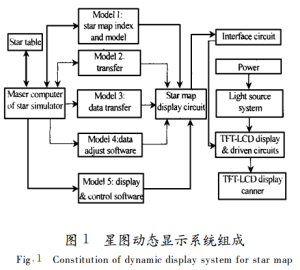
The star map dynamic display system includes core components such as the main computer of the star simulator, rapid query and retrieval of the star database, coordinate transformation, data transmission, and star map display. The various components of the star map dynamic display system are shown in Figure 1.
The main module functions in Figure 1 are:
Model 1 star database query and retrieval module: Based on the star database in the main computer of the star simulator, use a fast query algorithm to find the star data that meets the specific field of view angle coordinates and corresponding intervals to be displayed.
Model 2 coordinate transformation module: Complete the transformation from the coordinates of stars in the star database to the coordinates of two-dimensional plane images based on the queried and retrieved star data.
Model 3 data transmission module: mainly completes the transmission of star data between the main computer of the star simulator and the T FT-LCD display.
Model 4 data correction software module: Based on star data, complete the correction of magnitude and distortion.
Model 5 display control software module: Based on the optical display characteristics of the T FT-LCD display, complete the star map display and refresh function of the display.
1) Boundary dimension: 38.0mm × 42.0mm × 6.2mm
2) Display effective area: 26.6mm × 20.0mm
3) Elemental: 1024 × seven hundred and sixty-eight
4) Contrast ratio: above 200:1
5) Refresh frequency: 65MHz
6) Working temperature: 0 ℃~70 ℃; Power consumption (max.): 50mW
The TFT (thin film transistor) method can obtain the highest quality images in the active matrix mode, while TFT-LCD utilizes polycrystalline silicon technology and a built-in liquid crystal driver circuit on the substrate, which has the characteristics of miniaturization, light weight, and high reliability (see the dotted line in Figure 2). The interface circuit uses a programmable array FPGA as a dedicated integrated circuit, further reducing the overall size and improving the reliability and speed of star map data transmission.
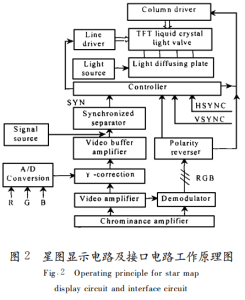
In Figure 2, the introduction of programmable gate array (FPGA) technology has made it possible to achieve high resolution, miniaturization, and integration of TFTs (thin film transistors). The use of specialized integrated circuits (ASICs) in the design of video interface controllers has increased the flexibility and practicality of the system.
The working principle of the video interface controller is to divide it into two parts, namely the digital and analog parts. The digital part includes ASICs for logic control and data, as well as buffers for data storage. The simulation section includes pixel clock generator, video amplifier, A/D conversion, and analog voltage source. Place the analog part at the front end of the interface controller to receive VGR video signals and convert them into digital format. The synchronization signal (Vsysc), (Nsysc), and clock (Clock) are also provided by this part. The digital part provides all clock control signals and video data management between T FT-LCD and the controller. The digitized video data is stored in a buffer and continuously sent to T FT-LCD for control.
To perform star recognition, it is necessary to obtain the original star map from the star simulator and extract the target and its features to be recognized. The typical features used for star map recognition are very clear, namely the position and magnitude of the star, and the simulation is based on these two features. The task of the star simulator software is to extract observation stars from the sub catalog according to the size of the field of view; Then perform coordinate and magnitude transformations separately; Finally, these stars are displayed in the form of two-dimensional images on a computer screen to achieve sky simulation.
(1) Extraction of observation stars
The azimuth and brightness of stars can be obtained from the catalog, and the SAO stars used contain 258997 stars, each accounting for 204 bytes, which includes a large amount of unnecessary information. Therefore, we edit a sub catalog that includes stars of magnitude 0-6.5 and their information such as magnitude, declination, and declination. We will simulate based on this sub catalog. To verify the performance of star map recognition algorithms in the entire celestial sphere, randomly generate the line of sight of star sensors( α 0 δ 0), then at 8 ° × Extract stars within a 6 ° field of view range from the sub catalog and store their data structures for future use.
(2) The Transformation from Celestial Coordinates to Planar Coordinates
Firstly, determine the coordinate system, which is the prerequisite for coordinate transformation. Coordinate transformation only changes the coordinate reference of the vector, and the size and direction of the vector remain unchanged after transformation, still representing the same physical quantity. There are two coordinate systems here: the celestial coordinate system used in the catalog and the coordinate system of the star sensor body. Let O-UVW represent the celestial equatorial coordinate system, and O ′ – X YZ represent the star sensor coordinate system. O is at the center of the Earth, and O ‘is at the optical center of the star sensor optical system. The origin of the two coordinate systems is different, so the transformation from the celestial coordinate system to the CCD plane coordinate system requires the use of coordinate translation and axis rotation. However, due to the fact that stars are very far away from Earth, the conversion of two coordinate systems does not need to take into account the errors caused by coordinate translation for star azimuth. The relationship between coordinates is determined by three independent Euler angles θ,Φ,φ It can be determined.
(3) Transformation of star to grayscale
Simulating the starry sky on a computer screen is equivalent to displaying a two-dimensional digital image. In addition to coordinates, it is also necessary to obtain the grayscale values of each pixel, which requires converting the magnitude of the stars into grayscale. The simplest method is to use linear transformation. The smaller the magnitude, the stronger the corresponding brightness, and the larger the corresponding grayscale value.
Due to the fact that computer monitors can only display up to 64 grayscale levels, considering the performance of CCD cameras, in order to avoid saturation, it is usually not necessary to take a full 64 grayscale levels, but only one segment of them. We select stars with minimum magnitudes of mmin=2.5 and mmax=6.5 in the catalog, resulting in a total of 40 grayscale levels. Set Umin=10 and display a grayscale level between 10 and 50. As this is only an approximate transformation, the magnitude value after transformation will be different from the true value, so the magnitude recognition should be carried out under a certain error threshold.
We adopt the star map dynamic display system with the T FT-LCD display device as the core component determined in this article, and develop a star simulator with a star map field of view of 8 ° × 6 °, single star angle:
Send us a message,we will answer your email shortly!
TY-Space Technology (Beijing) Ltd. is professional focusing on advanced attitude optical sensors, especially Star Trackers for space industry.


