
When the star sensors is operating in space, it is easy to be interfered by stray light such as sunlight, moonlight and earth-air light. As a result, the overall gray level of the star map taken is increased, the background uniformity is poor, and it is difficult to accurately extract the star coordinates. Aiming at the above problems and combining the existing algorithms, a composite background estimation star map processing algorithm under stray light interference is proposed. First of all, star points had the characteristics of dimensions ranging from 3×3 to 7×7 in diameter after point diffusion imaging, so the corresponding background estimation template was designed. Then, in order to improve the robustness of the algorithm and the utilization rate of local information, a pixel estimation template was designed. The two estimation templates calculate the post-processing data at the same time to achieve threshold segmentation, and then the centroid of star points was calculated. This method can better resist stray light interference and improve the accuracy of star extraction under stray light background.
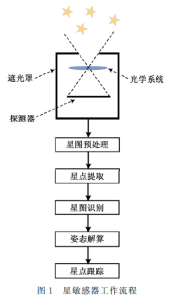
star sensors is currently the most accurate attitude sensor with high integration, accuracy, and reliability, playing a crucial role in space exploration missions. The workflow of the star sensor is shown in Figure 1, which mainly consists of an optical system, an image sensor circuit, and a digital image processing system,
In space missions, star sensor imaging is sometimes interfered by stray light such as sunlight, moonlight, and atmospheric light, making it difficult to distinguish star point targets from the background, ultimately resulting in invalid star attitude data and inability to extract the required targets. Therefore, how to resist stray light interference and accurately extract star coordinates from star maps in star sensors is an important research topic.
At present, the methods of star point target detection are generally divided into multi frame processing method and single frame processing method based on the number of image frames utilized. Image processing methods based on multiple frames, such as background subtraction, can reduce stray light interference to a certain extent by combining multiple frames of images to differentiate between the target and background. However, such methods require caching multiple frames of images, which will occupy a lot of storage space, which is a major drawback in aerospace tasks; Based on a single frame image processing method, the local adaptability of the threshold obtained by traditional methods is poor, and it is unable to correctly distinguish the target from the background in noisy light. There are currently three main effective methods to solve the interference of stray light in a single frame image on a hardware algorithm platform, namely threshold method, edge detection method, and background estimation method.
The commonly used threshold segmentation methods can be divided into global threshold method and local threshold method. The global threshold method determines a threshold for the entire image, which is suitable for images with obvious foreground and background differentiation. When encountering interference from stray light, it is almost impossible to extract star points; The local thresholding method is based on the global thresholding method. In order to better cope with the large changes in local information of images affected by stray light interference, the image is divided into multiple regions and threshold values are calculated separately to segment the image. This method has a certain anti stray light interference effect, but it still generates many false targets, which affects the extraction and calculation of real targets; Zhou Fengdao and others, based on the significant difference between star pixel values and background pixel values, use pixels with gradients greater than a certain threshold as a template and use the sobel operator to solve clutter interference. However, there are many false targets and the accuracy of star coordinates can only guarantee 0.5 pixel; Wang Hongtao et al. adopted the background estimation method and proposed the maximum background estimation method at the edge of the background to improve real-time performance. This method has a significant anti clutter effect. Yu Luwei also improved the background estimation algorithm by combining star features. However, existing background estimation methods, due to differential calculation, will change the structure of stars and have poor robustness when dealing with different situations of clutter, making it unable to cope well with various types of clutter environments.
In summary, several commonly used methods on current hardware algorithm platforms have certain drawbacks. Therefore, this paper proposes a composite background estimation star image processing algorithm based on the existing background estimation method. By calculating the surrounding area of pixels, better anti noise light effects are achieved. According to the experimental results, this method can effectively resist stray light and has good robustness.
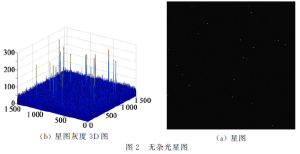
In the absence of interference from stray light, the vast majority of the star map captured by the star sensor has a uniform and flat background, with only a very small amount of useful star point information. In this case, as shown in Figure 2, the pixel value of the star point is much higher than the background pixel value, and a simple global threshold can be used to distinguish the star point from the background.
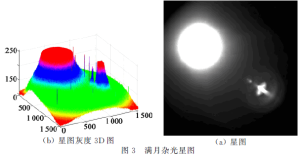
During the actual operation of the star sensor in orbit, it may sometimes be affected by stray light interference. As shown in Figure 3, the full moon stray light star map captured by the star sensor can cause significant changes in the gray distribution of the star map. Some star points have already been covered by stray light, and the average gray level of pixels has increased, making it difficult to distinguish between star point pixels and background pixels. Therefore, the anti clutter algorithm first needs to be able to extract star coordinates normally without clutter interference, and then achieve anti clutter star point extraction under clutter interference.
The basic idea of background estimation algorithm is that the grayscale value of image background pixels can be calculated and estimated using the grayscale values of surrounding pixels,
The key and difficult point of the background estimation algorithm lies in the determination of the weight matrix W in the model. When the weight matrix can be reasonably determined, in an ideal situation, the residual image will only retain star points and a small amount of noise. Subsequently, threshold segmentation and star point extraction can be performed using the residual image. However, when different types of stray light interfere with imaging, existing background estimation algorithms have poor noise resistance and robustness, so a composite background estimation algorithm is proposed.
On the basis of using local information once in existing background estimation algorithms, the composite background estimation algorithm proposes a secondary utilization of local information. At the same time, background estimation is performed, and pixel estimation is performed. Two different estimation templates are used for composite calculation to compare the values of background estimation and pixel estimation. A new threshold segmentation method can be used, which can better cope with various situations of stray light interference, Improved algorithm noise resistance and robustness.
The basic idea of using local information twice in the composite background estimation algorithm is: when using background estimation, each target pixel corresponds to 9 × When using FPGA for data calculation, the surrounding pixel data of 9 × The data of 9 is input in the same cycle, and on this basis, it can be adjusted to 9 × Create another 7 in the matrix of 9 × The weight matrix W2 of 7 is used for secondary multiplexing of surrounding data to estimate the grayscale value of the target pixel. The basic idea of using local information twice in the composite background estimation algorithm is: when using background estimation, each target pixel corresponds to 9 × When using FPGA for data calculation, the surrounding pixel data of 9 × The data of 9 is input in the same cycle, and on this basis, it can be adjusted to 9 × Create another 7 in the matrix of 9 × The weight matrix W2 of 7 is used for secondary multiplexing of surrounding data to estimate the grayscale value of the target pixel. Even if the shape of the star point changes, the accuracy of the calculated coordinates will inevitably decrease. When the star sensor is in orbit, the vast majority of the star map is a clean background without interference from stray light. Therefore, it is not suitable to use traditional background estimation algorithms throughout the entire process.
To address the above issues, a new approach to threshold segmentation will be adopted for star map segmentation using composite background estimation. By using the obtained background estimation image Y and target pixel estimation image Y1, if the relationship between the two satisfies equation (5), it indicates that the pixel is the target pixel and is retained; If not, it indicates that the pixel is a background pixel and its grayscale value is set to zero.
To verify the effectiveness of the algorithm in resisting stray light, multiple actual star maps based on simulated star maps and star sensor field observations were selected for experiments.
Experimental method: The overall idea is to first verify the effectiveness of the algorithm in extracting star coordinates under normal operating conditions, i.e. without interference from stray light, and then verify the effectiveness of the algorithm under interference from stray light. When verifying normal operating conditions, in order to accurately know the coordinate position of the star point, a simulated image is used. To better match the actual situation, Gaussian noise is added to the simulated image. When verifying the interference of stray light, select the existing actual star map under the interference of stray light, and then combine the simulated image with the actual stray light interference image to obtain a new star map. Then, the algorithm processes the new star map and evaluates the accuracy of star point extraction by comparing the corresponding coordinate positions of the simulated star map. To more intuitively demonstrate the effectiveness of the algorithm, the star map was processed using block threshold method, traditional background estimation method, and improved algorithm in this paper, and the results of the three methods were compared and analyzed.
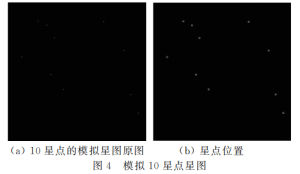
To verify the reliability of the composite background estimation algorithm without interference from stray light, a star map containing ten stars was simulated and generated as shown in Figure 4 (a). Due to the weak brightness of the stars themselves, the star positions in Figure 4 (a) were annotated as shown in Figure 4 (b) for ease of viewing. The centroid coordinates of the stars are shown in the actual coordinate column of the simulated star centroid in Table 1. The centroid coordinates of the stars were then processed and calculated using the algorithm proposed in this paper, The results refer to the scatter plot of absolute error values, and it is found that the absolute values of centroid coordinate errors are all less than 0.05 pixels, which meets the accuracy requirements for star point extraction. The algorithm proposed in this paper is feasible under normal conditions without interference from stray light.
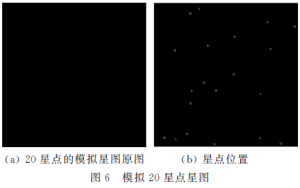
To verify that the composite background estimation algorithm can effectively resist stray light interference, Figure 3 (a) above is selected as the basic object for stray light processing. Figure 3 (a) is the original image of the full moon interference captured during the actual operation of the star sensor. In order to better compare the advantages of the algorithm in this paper in the experiment, a noise free star map of 20 weaker stars was simulated and generated. Figure 6 (a) and Figure 6 (b) annotated the star positions of the simulated star map. Figure 3
(a) The new star map obtained by merging with Figure 6 (a) is Figure 7 (a), which is divided into blocks
The threshold method, traditional background estimation method, and composite background estimation algorithm are processed in Figure 7 (a), and the results are shown in Figures 7 (b)~(d). The calculated data results are shown in Table 2.
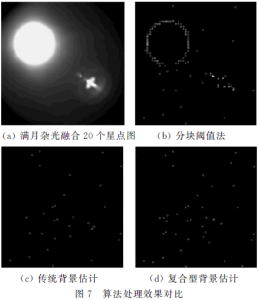

The data processing results of the algorithm on the star map are shown in Table 2. When using three methods to process the original image 3 (a) of the full moon clutter, the block threshold method extracted 124 targets, but did not remove the contour of the full moon, resulting in a high number of false targets. Traditional background estimation and composite background estimation algorithms extracted 22 and 25 targets respectively, which are relatively reasonable; Three more methods were used to process the new star image 7 (a) with 20 targets added. Among the new 20 targets, the block threshold method only extracted 8, the traditional background estimation method extracted 11, and the composite background estimation method extracted 17. Compared to the composite background estimation method, the performance of the composite background estimation method is better.
To further demonstrate the accuracy of the composite background estimation algorithm, the coordinates of 17 star points extracted from the new star map by the composite background estimation algorithm were compared and analyzed with the actual coordinates during simulation. Based on the results, the absolute error scatter plot was drawn, and it can be seen that the x-axis direction error is less than 0.15 pixels, with a mean error of 0.0754 pixels; The maximum error in the y-axis direction is about 0.2 pixels, with an average error of 0.0791 pixels, which meets the accuracy requirements for subsequent work of the star sensor.
To improve the performance of star sensors and better achieve star point extraction under stray light interference, this paper proposes a composite background estimation algorithm. The algorithm combines star features and improves the utilization of local information on the basis of existing background estimation algorithms, using composite templates to process star maps. According to the experimental results, firstly, the method proposed in this paper has reliable accuracy in centroid extraction under normal operating conditions without interference from stray light; Secondly, in the presence of strong stray light interference, the algorithm performs better than the commonly used block threshold method and traditional background estimation method in engineering, and the accuracy error is small, which can meet the requirements of subsequent star map recognition and other processes.
Send us a message,we will answer your email shortly!
TY-Space Technology (Beijing) Ltd. is professional focusing on advanced attitude optical sensors, especially Star Trackers for space industry.


