
In recent years, commercial aerospace micro-satellites have achieved the goals such as light weight,small size, low cost, and rapid development. However, in the aspect of satellite attitude control, owing to the accuracy level of measurement sensors such as star sensors, it is hard to achieve high-precision measurement and control. In order to meet the requirements of high-precision attitude measurement and large angular velocity motion for micro-satellites in orbit, in this paper, a star image processing algorithm of tracking window for CMOS detector star sensors is proposed. Based on the attitude information and navigation star library, the imaging positions of the detecting star points can be predicted through coordinate system rotation and perspective projection transformation. The CMOS detector tracking window is set according to the tracking window setting, by which the pixel grayscale data are collected and the background grayscale values for predicting the sub regions of stars in the image are calculated. With the proposed algorithm, the accuracy of star centroid is improved, and the image processing speed of star point centroid extraction is accelerated. Laboratory dynamic light star mode and field observation experiments are carried out for verification. The results show that the proposed algorithm improves the accuracy (2″/16″) and dynamic performance (3 (°)/s) of the star sensor, while enhances the probability of all-day recognition and tracking data efficiency.
The attitude measurement system is an important component of aerospace vehicles, which is a prerequisite for controlling the stable or smooth motion of spacecraft. The primary key component of the attitude measurement system is the attitude sensor. With the continuous development of aerospace technology, higher requirements have been put forward for the measurement accuracy of spacecraft attitude. Especially commercial microsatellites are constrained by conditions such as volume, mass, power, and cost, requiring the configuration of low-power, lightweight, and low-cost attitude sensors. Star sensor is a highly autonomous attitude sensor that uses a detector to image the starry sky, measure the component of the star vector in the star sensor coordinate system, and use the precise position of known stars to determine the three-axis attitude of the satellite relative to the inertial coordinate system. Due to being the most precise and minimally drift attitude measurement component to date, star sensors have become essential attitude sensors on satellites. The measurement accuracy and dynamic performance of star sensors are the most important indicators to measure their performance. Analyzing the factors that affect measurement accuracy and dynamic performance, and improving the attitude measurement accuracy and dynamic performance of star sensors, are key issues that need to be addressed in star sensor research. The resolution of ground remote sensing measurement satellites has reached the sub meter level, and the requirements for satellite control and measurement accuracy are better than 5 (°)/s. The initial orbit entry, rapid maneuvering, and large angle attitude adjustment of satellites pose high requirements for the dynamic performance of star sensors. Traditional star sensors cannot meet existing requirements in terms of accuracy and dynamism.
When the star sensor starts working, it is in the initial attitude capture mode for all day star map matching and recognition, so searching and matching take a lot of time. Generally, the recognition process takes seconds, which is unfavorable for real-time attitude output. After obtaining the initial attitude through full sky star map recognition, the star sensor automatically enters star tracking mode. The initial capture time for full day recognition is generally less than 5 seconds, and most of the subsequent time, the star sensor is in star tracking mode, which does not require full day search and recognition, so the processing time for tracking mode is short. The initial attitude capture is only performed when the start or tracking is lost. If the tracking mode is very stable, the star sensor will remain in a real-time tracking state after the initial attitude capture. Therefore, real-time tracking is one of the main working modes of star sensors, which directly affects the overall performance of star sensors. The improvement of star map imaging quality and fast processing ability in star tracking mode has a significant impact on the overall accuracy and dynamic performance of star sensors. Therefore, studying this star map processing algorithm is very meaningful.
At present, mainstream star sensor companies at home and abroad mainly have two types of products, among which the first type is high-precision and reliable star sensors, which are mainly characterized by high accuracy, long service life, large mass and volume, and high price; Another type of product is the micro star sensor, which is mainly characterized by small size, low price, average accuracy, data update rate, and other performance. According to the current requirements for control and measurement accuracy of commercial satellites, domestic and foreign star sensors cannot meet the requirements of new space vehicles in terms of accuracy and dynamic performance indicators. For example, the static measurement accuracy of the ASTRO CL star sensor from Jena in Germany is 6 “/48”, and the AURIGA SA star sensor from Sodern in France has a static measurement accuracy of 6 “/40”.
There are three main types of existing star tracking algorithms: the first type is window method, the second type is centroid tracking method, and the third type is filtering algorithm. The star tracking algorithm proposed by Yu Luwei et al. needs to first detect star pixels in the image based on threshold coarse screening, and then open a window around it to obtain accurate centroid coordinates. This algorithm requires first obtaining the threshold and filtering the entire frame of image data, which takes a long processing time. The star tracking algorithm proposed by Li Baohua et al. mainly calculates angular velocity and predicts the current attitude based on the previous two consecutive frames of attitude data. This algorithm provides the predicted star image coordinates, but does not provide specific guidance on the detailed methods of star sensor windowing, detector driving, and acquisition at this pixel coordinate. The tracking algorithm proposed by Jin He et al. is mainly based on Kalman prediction. This algorithm requires the use of prior information to model the trajectory of star points. Star tracking simulation experiments were completed on a computer platform, but the specific implementation method and testing effect of this algorithm applied to a specific star sensor hardware platform were not provided. The star tracking algorithm proposed by Zheng Xunjiang et al. utilizes the relationship between star vectors and angular velocity for star point prediction. However, under high dynamic angular velocity, the estimation error of angular velocity increases accordingly.
The star image processing algorithm in the article deeply analyzes the reasons that affect the accuracy and dynamic performance of the star sensor. Based on the circuit framework of the star sensor and the characteristics of the CMOS detector, a star image processing algorithm in star tracking mode is proposed. The current attitude is predicted based on the attitude data of previous frames, and the predicted attitude information is used to guide the windowing area of the star sensor in the next frame. The specific method for image driving and acquisition of the detector is provided, Applied to actual star sensor hardware platforms, and verified through dynamic optical star mode and field observation experiments, the data analysis results show that this algorithm can effectively improve the accuracy and dynamic performance of the entire star sensor.
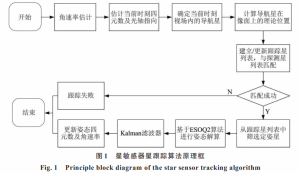
After the star sensor is successfully recognized throughout the day, it enters the star tracking mode, and the image processing algorithm in the star tracking mode consists of the following steps:
1) Tracking preparation, angular rate estimation;
2) Predicting the direction of the optical axis;
3) Predicting navigation stars within the field of view;
4) The predicted navigation star matches the measured star points;
5) Fixed pose star screening;
6) Perform attitude calculation based on ESOQ2 algorithm;
7) Kalman filtering;
8) Update attitude quaternion and angular rate.
The purpose of star tracking is to quickly establish the corresponding relationship between the extracted star points in the digital star map and the stars stored in the navigation star library after obtaining prior attitude information. After successful all-day recognition, the quaternion Q=[q0, q1, q2, q3] after successful all-day capture has been calculated, (q0 is a scalar, the same below), and the star sensor automatically switches to star tracking mode.
In order to facilitate the description of the star tracking algorithm, in the following discussion, it is assumed that the recognition results of the k-1st frame star map during the star tracking process are known. The observation star map of the current k-th frame (the star map collected by the star sensor) is tracked and recognized. The principle block diagram of the star tracking algorithm is shown in Figure 1, and each step is described in detail in the figure. ESOQ2 (Second EStimator of the Optimal Quantion) in the figure is the attitude determination algorithm, and Kalman filter is an algorithm that utilizes linear system state equations to perform optimal estimation of system state through input and output observation data.
When star sensors are used for all sky sphere recognition, due to the lack of prior attitude and position information for the current sky area, it is necessary to drive the detector processing module of the star sensor to process the entire star map taken and extract star points, which is to use full frame image processing. After successful recognition throughout the day and accumulation of multi shot attitude information, the star sensor enters the steady-state star tracking mode. In the star tracking mode, the star sensor drives the detector module to only extract star points from some images based on prior attitude and angular velocity information, which adopts local image processing.
This article utilizes the known attitude and angular velocity prior information in the star tracking mode to convert the star points (navigation stars) in the current celestial field of view into the detector plane, and processes and extracts the pixels in the region based on the theoretical position of the navigation star. Taking the star sensor CMOS detector CMV4000 as an example, this paper analyzes the differences between traditional image processing methods and image processing methods based on tracking window settings from several aspects such as storage space resources, image readout time, and centroid positioning accuracy.
The traditional star map processing algorithm is mainly divided into two parts. Firstly, the processor reads the image data and performs threshold segmentation, connectivity analysis, and interpolation subdivision positioning to obtain the effective coordinate information of the star points and save it, completing the star point extraction work of the image. Secondly, the processor uses a triangle algorithm based on star information to match the triangle pattern formed by the stars with the triangles in the navigation star library.
This traditional star map processing algorithm requires a long time to read and process the entire image, and is prone to introducing detector noise and environmental interference, resulting in false star points that affect overall accuracy. At the same time, the slow calculation speed affects dynamic performance.
The traditional image processing method requires storing the entire detector image. The detector has 2048 rows and 2048 columns of pixels, with each pixel stored at 8 bits, requiring 2048 pixels × two thousand and forty-eight × 8 bit=33 554 432 bit storage space.
Set the image processing method for the tracking window, based on the actual star sensor attitude algorithm requiring 30 detection stars (upper limit) as an example, and according to the worst-case scenario where the star points are at the intersection of 4 grids, the maximum required storage space is 30 × four × eight × eight × 8=61 440 bit storage space.
From the analysis of image output time, traditional image processing methods need to drive the detector to output the entire image, and process it after collection. The detector input main clock frequency is 5 MHz, the clock cycle Tm is 200 ns, and the output is based on 4 channels. The Nooutput is 4, and the number of output lines for the entire image Nline is 2048. Therefore, it can be calculated that the output time T of the entire image from the image sensor is 211.4 ms. The image processing method for tracking window settings is as follows: as long as the image data near the predicted star point is output, based on the actual star sensor attitude algorithm, the required number of detection stars is 30 (upper limit) as an example, and according to the worst-case scenario where the star point is at the intersection of four grids, the maximum required output image rows is 30 × two × 8=480 lines, image output time T1 is 49.5 ms.
Star sensors are attitude measurement sensors. Under the same attitude recognition algorithm conditions, attitude accuracy depends on the accuracy of measuring star coordinates. The threshold plays a key role in the calculation of star coordinates. The threshold is used to segment the stars and background in the image, and its reasonable value will affect the accuracy of the star centroid. The image processing algorithm for tracking window settings is in the form of 4 grids per navigation star (16 × 16 pix) Store the gate image, centered around the predicted navigation star coordinates, and process 10 × For image data within the 10 pixel range, before extracting star points, the star point extraction threshold is first determined. The threshold is obtained by accumulating the gray level offset based on the calculated gray level mean. In traditional star image processing algorithms, the offset value is adaptively adjusted according to the gray level mean. Considering unknown noise and bad pixels within the entire image array, in order to avoid interference from incorrect information, the gray level mean is generally taken as 1/2, The selection of the m-value in traditional star image processing algorithms is the average gray level of the entire star image. Due to the fact that the starry background is mostly dark, there is an error in this average gray level compared to the average energy near constant star points, which is usually too low. If the average is too low, it will lead to a low threshold for star point extraction, which will be affected by noise interference and extract false star points, affecting the attitude accuracy of star image recognition.
In the tracking window setting image processing algorithm, as the star information is predicted and calculated based on the quaternion attitude information, as long as the pixels in the window near the star are considered to be reduced by factors such as pixel random noise, bad pixels, and environmental interference, the value of the gray level offset can be taken smaller after obtaining the average gray level of the sub region. Therefore, the tracking window image processing method not only avoids the interference of environmental factors such as noise and bad pixels caused by the global grayscale mean of the image, but also calculates a more accurate mean within the window range. By reducing the threshold offset, the effect of star point dispersion spots is fully utilized, and the number of effective pixels screened is increased by four times. In the subsequent application of the centroid method to calculate the center coordinates of star points, the centroid positioning accuracy can be improved from the traditional 1/20 pixel to 1/50 pixel. The improvement of star point centroid accuracy can accelerate the matching speed of triangle angular distance, reduce the probability of mismatching, and provide assurance for final pose recognition and accuracy improvement. The comparison between traditional star map processing algorithms and tracking window setting image processing algorithms is shown in Table 1.
![]()
Compared to traditional methods, the entire detector image is stored and star points are extracted through progressive scanning from the entire detector image. The image processing method based on tracking window settings significantly reduces image storage space and processing time, while reducing storage costs and increasing attitude data update frequency, thereby achieving an improvement in the dynamic performance of the star sensor. Simultaneously predicting the attitude information, selecting the appropriate window range, selecting the appropriate threshold, fully utilizing the star dispersion effect, improving the accuracy of star centroid positioning, thereby achieving the effect of improving the attitude accuracy of the star sensor.
The main performance indicators of star sensors are largely related to the design of star map processing algorithms. The algorithm described in this article was validated based on field observation experiments, and the verification content is as follows: 1) static accuracy; 2) Dynamic performance; 3) Data efficiency.
Precision testing method: Under ground speed conditions, vertically facing the sky, utilizing the stability of ground speed. Analyze the observed data of the star sensor perpendicular to the sky, and draw the data curve. Fitting quaternion sample points with polynomials to obtain a reference quaternion curve, subtracting the measured quaternion from the reference quaternion, and converting it into a three-axis attitude angle can obtain an attitude error curve.
Dynamic performance testing test method: Control the two-dimensional star observation turntable to rotate around the X or Y axis of the product at a certain angular velocity, observe the effective signs of data and the number of stars in the telemetry data at different speeds.
In the field observation comparison experiment, the star sensor using the traditional star map algorithm can stably track a maximum angular velocity of 0.8 (°)/s, and the star sensor using the tracking window setting image processing algorithm can stably track a maximum angular velocity of 3 (°)/s.
Test method: Control the two-dimensional star observation turntable to rotate around the X or Y axis of the product at a certain angular speed. Control the turntable to move the star sensor at speeds of 0.6, 0.7, 0.8, 0.9, 1.0, 2.3, 2.8, and 3.0 (°)/s, and observe the effective markers and number of stars in the telemetry data at different speeds. The effective markers and number of stars curve are shown in Figure 4.
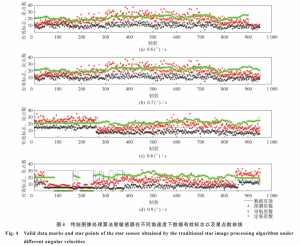
From Figure 6, it can be seen that when the star sensor rotates at angular velocities of 1.0, 2.3, 2.8, and 3.0 (°)/s, the data efficiency is 100% and stable tracking can be achieved. The three-axis attitude accuracy of the star sensor using traditional star map processing algorithms is shown in Figure 7.
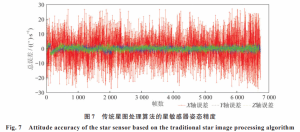
As shown in Figure 7, the star sensor uses traditional star map algorithms to vertically analyze the sky observation data and calculate the three-axis attitude accuracy. The three-axis attitude accuracy is 4.41 (°)/s for the Z-axis, 4.64 (°)/s for the Y-axis, and 27.23 (°)/s for the X-axis, respectively. The three-axis attitude accuracy of the star sensor using the tracking window to set the star map processing algorithm is shown in Figure 8.
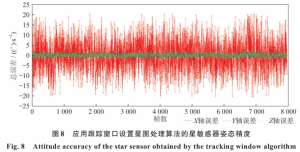
As shown in Figure 8, the star sensor uses a tracking window star image processing algorithm to vertically analyze the sky observation data and calculate the three-axis attitude accuracy. The three-axis attitude accuracy is obtained as follows: Z-axis 2.05 (°)/s, Y-axis 2.17 (°)/s, and X-axis 15.91 (°)/s. The main performance parameters of star sensors using different star map processing algorithms are compared in Table 2.
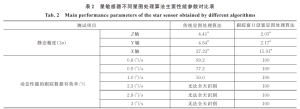
The star map processing algorithm proposed in this article obtains predicted navigation stars based on attitude information and navigation star database in the star tracking stage, and arranges them in ascending order. Through coordinate system rotation and perspective projection transformation, the predicted star point coordinates are obtained. Based on the characteristics of the CMV4000 detector selected for star sensors, the adjacent regions of the predicted star points are merged to obtain the start and end positions of the detector’s window opening. This reduces the star map reading time by one-third and improves the data update rate. Match the predicted star map with the measured star map to obtain new attitude information. The star map processing algorithm analyzes the main performance indicators of the star sensor with an accuracy of 4.5 “(3 σ) Upgrade to 2.1 “(3 σ), The dynamic performance has been improved from 0.8 (°)/s to 3.0 (°)/s, demonstrating significant effects in both accuracy and dynamic performance. A star map processing method and experimental verification results for star sensors are provided, providing reference for improving the core performance of star sensors such as attitude accuracy, dynamic tracking, and data efficiency.
Send us a message,we will answer your email shortly!
TY-Space Technology (Beijing) Ltd. is professional focusing on advanced attitude optical sensors, especially Star Trackers for space industry.


