")
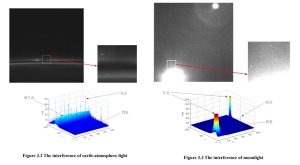
During operation, star sensors may encounter interference from scattered light such as terrestrial light, sunlight, and moonlight. Stray light can cause local areas or overall brightness in the star map captured by the star sensor, resulting in the overall background value being raised and some star points being submerged in stray light. The appearance of stray light can easily lead to false positives of star points during the detection phase, leading to an increase in false alarm rate and affecting subsequent star point recognition. In the design process of star sensors, a light mask is usually used to suppress stray light at a certain angle. However, for stray light that enters the field of view of the star sensor directly or through reflection, the effect of the light mask is minimal. At this point, it is necessary to suppress stray light through algorithms and software processing, and successfully complete star detection.
Stray light refers to the light that enters the optical system of a star sensor through scattering or other means by light outside the target in the field of view. It generally refers to terrestrial light, sunlight, moonlight, and so on. After sunlight and moonlight enter the hood, they reach the detector target through multiple reflections, refractions, and diffraction on the inner surface of the hood. Sunlight and moonlight generally belong to parallel incident stray light, while terrestrial light is reflected directly or through the surface of satellites and external instruments into the hood, and finally projected onto the detector target surface through the transmission of the internal surface of the hood. Earthly light usually belongs to diffuse stray light. In order to suppress the interference of stray light, star sensors usually suppress some stray light by designing a light mask. However, stray light smaller than the avoidance angle of the light shield can still enter the target surface of the star sensor detector through direct light and reflection.
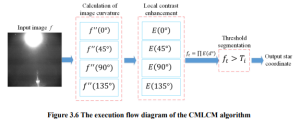
The execution process of the CMLCM algorithm:
(1) Image curvature calculation
Although a star map is composed of discrete pixels at the two-dimensional level, due to the relative continuity of pixel grayscale in the local area, the star map can usually be regarded as a two-dimensional surface.
Consider a star map as a spatial surface and use curvature to characterize its features. Use the facet model to calculate the second derivative of the star map in four directions, and use the second derivative to represent the curvature of the star map
(2) Local contrast enhancement
A new local contrast enhancement method is proposed by combining the differences in the second-order derivatives of stars and background images (including stray light) in four directions, which can enhance the local second-order derivatives of stars while weakening the second-order derivatives of background and stray light.
Using the second-order derivatives obtained from the star map in the directions of 0 °, 45 °, 90 °, and 135 °, local contrast enhancement is performed on the star targets in the star map. Local contrast enhancement is aimed at enhancing the features of star targets while simultaneously weakening the interference caused by complex backgrounds (referred to as stray light).
(3) Threshold segmentation
After completing the calculation of the local contrast enhancement image 𝑓𝑡, a simple local threshold segmentation method is used to locate the stars, and the entire local contrast enhancement image 𝑓𝑡 is divided into 256 × Multiple regions with a size of 256 (the number of regions is based on the image resolution).
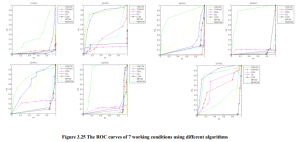
The CMLCM algorithm can cope with various stray light effects. Although the CMLCM algorithm detects a relatively small number of valid stars in individual scenarios, it also detects the fewest number of false stars. It is beneficial to reduce the possibility of mismatching when using detected star points for star point recognition in the later stage, and improve the capture speed and success rate of the star sensor.
Send us a message,we will answer your email shortly!
TY-Space Technology (Beijing) Ltd. is professional focusing on advanced attitude optical sensors, especially Star Trackers for space industry.


